Beckhoff Automation présente TwinCAT Kinematic Transformation Level 4
03/09/2014
TwinCAT Kinematic Transformation permet au constructeur et à l’utilisateur de machine de piloter des robots et des constructions cinématiques même complexes à partir du logiciel TwinCAT .
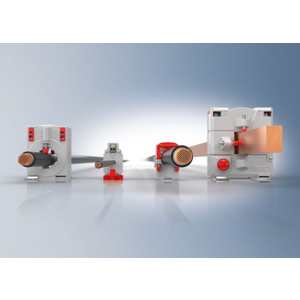
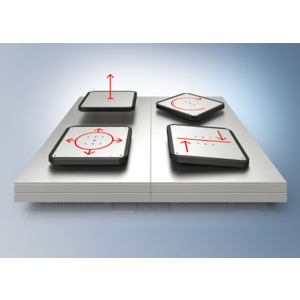
TwinCAT Kinematic Transformation offre déjà de nombreuses cinématiques qui, en fonction de leur complexité, sont réparties dans trois différents niveaux de produit. Parmi ces niveaux figurent notamment la cinématique 2D, la cinématique à ciseaux, les cinématiques 3D Delta et SCARA. Avec le nouveau niveau 4, la plage de fonctions a été élargie de manière conséquente. Ainsi, même des cinématiques plus complexes peuvent désormais être mises en œuvre. À titre d’exemple, citons une cinématique série à 6 axes et la plateforme Steward.
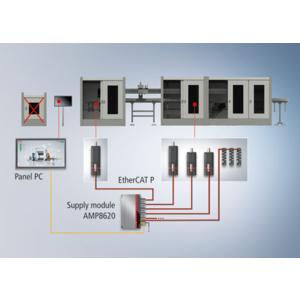
TwinCAT prend en charge la génération des consignes et le calcul des transformées. Les valeurs de consignes pour les axes sont transmises de manière cyclique via EtherCAT au variateur, par exemple le variateur AX5000. La programmation du mouvement du robot s’effectue directement à partir du PLC. Bien entendu, les trajectoires sont décrites en code ISO DIN 66025 et décodées avec TwinCAT NC I.
TwinCAT Kinematic Transformation permet de se passer de la baie robot et, par conséquent, ne nécessite pas l’apprentissage d’un langage de programmation de robot spécifique. L’ensemble de la machine peut être commandé avec un seul CPU.
Autres actualités Beckhoff Automation

























































Beckhoff lance TwinCAT HMI








Panel PC étanche CP37xx













Servomoteur inox AM8800











Beckhoff Automation Update


Servomoteurs inox AM8800

Ecrans tactiles MultiFinger















PC Embarqué CX8000