TwinCAT 3, la nouvelle génération d’outils logiciels pour la technique de commande sur base PC
04/01/2010
Grâce à TwinCAT 3 et à la eXtended Automation Technology (XAT), Beckhoff met à disposition un logiciel de commande sur base PC qui enrichit considérablement le secteur de l’automatisation standard.
Grâce à l’eXtended Automation Architecture (XAA), les atouts de notre TwinCAT actuel s’amplifient. En outre, tous les bus de terrain courants seront supportés à l’avenir. Le Motion Control est naturellement toujours possible, des fonctionnalités point à point jusqu’au système CNC. Avec les domaines d’automatisation scientifique déjà présentés, comme la robotique, la technique de mesure et le Condition Monitoring, la technique d’automatisation pure est considérablement élargie. La nouveauté réside dans la possibilité d’utiliser d’autres langages de programmation, comme C/C++ et Matlab®/Simulink®.
L’environnement d’eXtended-Automation-Engineering (XAE) est le programme largement répandu Microsoft Visual Studio®. En plus des langages C/C++ déjà existants, Beckhoff a également intégré le langage de programmation IEC 61131-3 à cet environnement de développement mondialement connu. Les avantages de l’IT-Framework peuvent ainsi être utilisés pour l’automatisation.
De même, TwinCAT System Manager, l’outil de configuration des E/S et du Motion, a également été intégré au même environnement de développement. L’avantage réside dans les possibilités d’intégrer d’autres langages de programmation en peu de temps ou encore d’utiliser d’autres outils, comme des outils de gestion des codes source.
Avec la deuxième variante, les composants TwinCAT 3 s’intègrent directement dans Visual Studio® 2010, pour autant que celui-ci soit présent. Sinon, Visual Studio® est installé avec les composants TwinCAT 3. Avec cette version, en plus des langages de programmation C/C++ et donc de la liaison à l’environnement Matlab®/Simulink®, l’utilisateur a la possibilité d’opter pour Matlab®/Simulink® Real-time Workshop. Un débogueur avec fonction de contrôle en ligne a été développé pour les langages de programmation C/C++. Il va au-delà des fonctions de débogage classiques de C/C++.
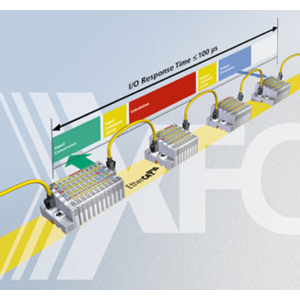
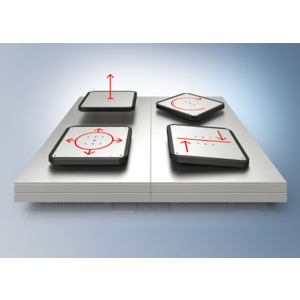
Avec eXtended Automation Runtime (XAR), tous les modules, programmés en IEC 61131, C/C++ ou Matlab®/Simulink®, sont exécutés en temps réel. Pour cela, on utilise l’extension temps réel des systèmes d’exploitation Windows par TwinCAT, éprouvée. Les tâches peuvent être traitées dans un temps de cycle minimal de 50 μs avec un Jitter très faible. TwinCAT a été étendu afin de permettre l’organisation des différentes tâches sur les différents noyaux d’un processeur multi-cœur. Les performances de la commande du PC sont ainsi améliorées.
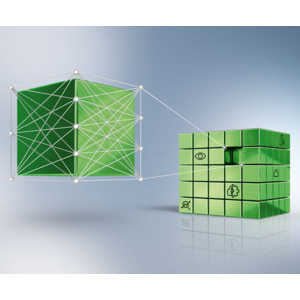
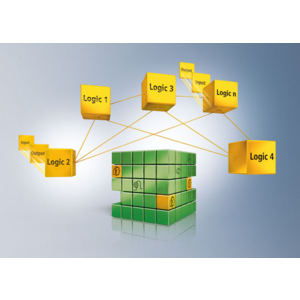
En outre, TwinCAT 3 soutient les systèmes d’exploitation 64 bits. L’architecture modulaire du logiciel composée d’interfaces claires permet avant tout le traitement d’objets Runtime écrits dans différents langages de programmation. Ces interfaces que l’on appelle TcCOM sont empruntées au célèbre modèle composant-objet et sont adaptées pour la technique d’automatisation. Les modules sont appelés par des tâches via cette interface et peuvent également s’appeler mutuellement, indépendamment du langage de programmation. Avec cette définition de module, des Automation Device Driver (ADD) peuvent aussi être réalisés au niveau le plus bas. Ceux-ci peuvent par exemple être des pilotes pour de nouveaux bus de terrain.
Autres actualités Beckhoff Automation

























































Beckhoff lance TwinCAT HMI








Panel PC étanche CP37xx













Servomoteur inox AM8800











Beckhoff Automation Update


Servomoteurs inox AM8800

Ecrans tactiles MultiFinger














PC Embarqué CX8000