Automation Technology for Robotics (ATRO) , le robot parfait pour chaque application
08/07/2022
Avec ATRO, Beckhoff présente un nouveau concept pour les applications robotiques. Il s'agit d'un système modulaire qui permet d'assembler la cinématique du robot de manière extrêmement flexible pour chaque application
Avec ATRO, les utilisateurs peuvent créer quasiment toutes les conceptions de robot pour leur application à partir des modules fournis - d'une simple application sur table d'indexation rotative à 1 axe et cinématique delta, jusqu'aux robots articulés à plusieurs axes.
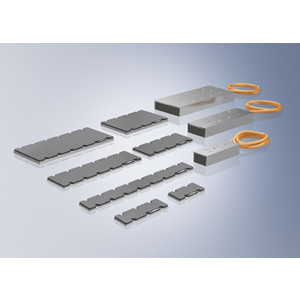
La cinématique d'ATRO est constituée d'articulations actives – les modules moteur. Différents modèles de modules moteur sont disponibles : modules droits en forme de I ou modules angulaires en forme de L, qui sont conçus en cinq gammes de puissance. Chaque module moteur forme un système d'entraînement complet pour un axe du robot. Les seuls composants externes nécessaires sont un bloc d'alimentation et une commande, ce qui réduit considérablement l'espace requis dans l'armoire de commande.
Outre les modules actifs, il existe des modules de raccordement sans leur propre moteurs :
– Modules de base avec guide câble
– Modules de liaison avec des formes en I, L et Y pour des configurations individuelles
– Modules système qui peuvent être utilisés pour intégrer des fonctions supplémentaires telles qu'une caméra
Avantages du guide câble interne
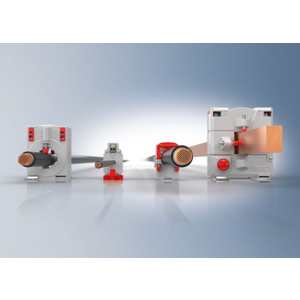
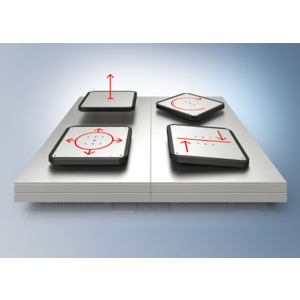
L'un des points forts du système est le dispositif interne de transmission d'informations pour les données, l'alimentation et les fluides - guide câble. Tous les modules sont interconnectés via l'interface ATRO, qui garantit une connexion rigide et laisse également passer les supports médias introduits. Les données, l'alimentation et les fluides (air comprimé, vide ou eau) sont ainsi guidés en interne via les modules de la cinématique
ATRO. Les solutions robotiques classiques les font passer par l'extérieur et sont donc limitées en termes de rotation et d'utilisation de l'espace de travail. La solution Beckhoff élimine complètement ce problème : chaque axe peut être tourné sans fin, ce qui permet une meilleure accessibilité et des chemins de positionnement plus courts.
De plus, les contours gênants, par exemple dus à des câbles situés à l'extérieur et, en particulier dans le cas de cobots, à des couples dérangeants, sont évités grâce à leur passage interne. D'autre part, les supports sont fournis pour une application client via les interfaces ATRO, et presque tous les outils robotiques peuvent être facilement intégrés, comme les systèmes de préhension sophistiqués.
Une intégration illimitée du système
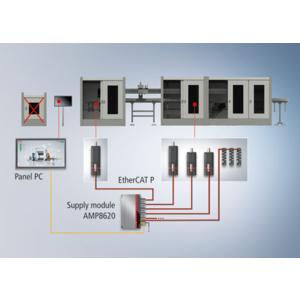
Avec ATRO, Beckhoff propose un système robotique très flexible qui dispose de toutes les fonctionnalités essentielles de la machine, grâce à son intégration poussée dans le logiciel d'automatisation TwinCAT. Comme par exemple le traitement des images pour des applications complexes (« bin picking »), l'amélioration des performances de déplacement via le machine learning ou l'intégration directe dans le cloud pour l'analyse et la maintenance. L'utilisation d'interfaces ouvertes et de normes universelles permet une configuration prête à l'emploi du robot créé et une ingénierie simple.
Cette variété de fonctions concentrées dans une seule commande minimise les coûts de matériel et permet également une synchronisation maximale de tous les composants ainsi que de faibles retards dans la communication des données. Cela inclut également la combinaison directe avec des solutions de transport intelligent telles que XTS et XPlanar. D'autres domaines tels que la communication, la sécurité fonctionnelle et l'application à proprement dite peuvent être créés avec peu d'efforts. Cela permet non seulement de configurer une solution globale extrêmement puissante avec un rendement maximal du système, mais aussi de réduire l'encombrement de la machine, ce qui était auparavant impossible.
Autres actualités Beckhoff Automation
























































Beckhoff lance TwinCAT HMI








Panel PC étanche CP37xx













Servomoteur inox AM8800











Beckhoff Automation Update


Servomoteurs inox AM8800

Ecrans tactiles MultiFinger















PC Embarqué CX8000