Capteurs de détection multiScan et safeVionary2 pour AGV et robots mobiles
18/09/2023
Ces nouveaux capteurs multiScan et safeVisionary2 de SICK améliorent significativement l’efficience des AGV, des AGC et des AMR en leur assurant notamment une vue panoramique à 360° en 3D ainsi qu'une solution de sécurité en 3D.
Capteur LiDAR 3D : pour tout contrôler autour du véhicule
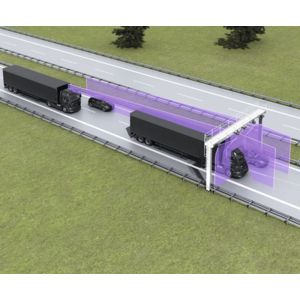
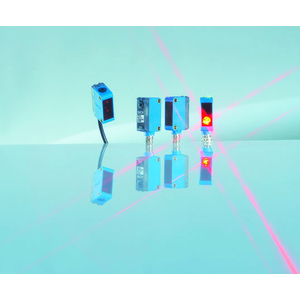
Avec le lancement de la gamme de produits multiScan100, SICK présente des capteurs LiDAR 3D qui assurent aux robots mobiles une vue panoramique à 360° en 3D. En raison des 690 000 points de mesure, le multiScan100 atteint une précision de pointe grâce à laquelle rien ne lui échappe dans son environnement.
Avec sa forme compacte d’environ 10 cm et la prise en charge d’interfaces industrielles, il est très facile à intégrer.
La première variante, le multiScan136, fournit des données de mesures 3D pouvant être utilisées pour une localisation autonome précise de véhicules ainsi qu’une cartographie simultanée de l’environnement (SLAM, pour Simultaneous Localization and Mapping).
De plus, grâce aux capteurs LiDAR 3D, il est possible de détecter des bords ou des obstacles en 3 D. Cela permet aux robots mobiles comme les AGV ou les robots de service d’explorer un nouvel environnement de façon autonome et de le cartographier, les données pouvant être utilisées pour la navigation et la localisation.
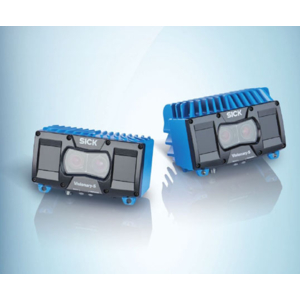
Caméra 3D safeVisionary2 : la sécurité en 3D pour les robots mobiles
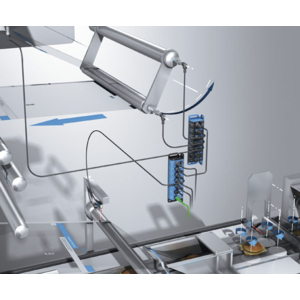
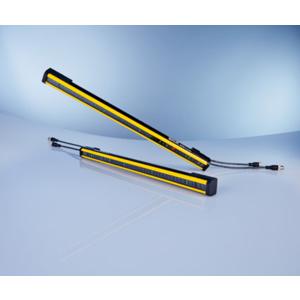
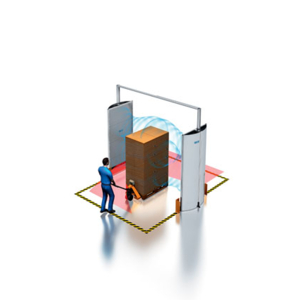
La nouvelle caméra 3D temps de vol safeVisionary2 de SICK est la première solution de sécurité 3D de son genre utilisable de manière universelle à avoir un certificat de sécurité jusqu’au niveau de performance c. Le champ de protection tridimensionnel permet aux plateformes mobiles de détecter et de localiser les obstacles dans l’espace de manière sécurisée. Pendant un transport, la safeVisionary2 surveille le trajet en 3D, c’est-à-dire l’espace au-dessus du plan de balayage du scrutateur laser de sécurité installé sur le véhicule. Les objets qui franchissent ce champ 3D, par exemple un crochet de grue ou des palettes ou des objets dépassant des étagères, sont détectés avec fiabilité.
La même chose s’applique à la protection des côtés lors des manœuvres d’AGV et de robots mobiles pendant les procédés de chargement et de déchargement. La vitesse d’approche ou de rotation peut être réduite jusqu’à une distance définie par rapport à l’obstacle avant que le robot mobile ne soit arrêté pour une prévention des collisions. En fonction de l’alignement du champ de protection 3D, il est également possible de surveiller des zones inférieures au plan de balayage du scrutateur laser de sécurité et d’éviter ainsi les dangers de basculement ou de chute sur les escaliers, les rampes ou les bords de quai de chargement.
Autres actualités SICK France
























































Capteur photoélectrique miniature W4F



















Sensor Integration Machines SIM1012







































SICK: des chiffres records en 2016

Analyseurs d'oxygène ZIRKOR de SICK

Capteur de brillance Glare Sensor

Capteurs d’inclinaison TMM/TMSXX






Roue de mesure DBV50

SICK poursuit sa croissance en 2015



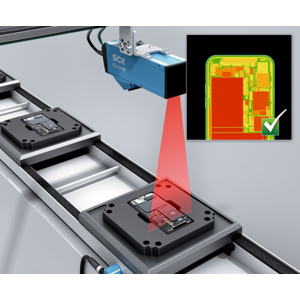
Capteur de vision 3D TriSpector1000

Barrage de sécurité deTec4 Prime




Codeur de sécurité DFS60S Pro

Détecteur de Brillance Glare


Détecteur de couleurs CSM de SICK


Portique de lecture RFID RFU620


Scrutateurs laser de sécurité SICK













Nouveau système de détection FLG

Analyseur de mercure MERCEM300Z

Capteur de positionnement DL HI 100









Capteur de position magnétique MPS




Nouveau système de Vision IDL



Capteur de niveau de remplissage UP56


Caméra de sécurité V300 WS Extended