AVL et Rohde & Schwarz annoncent une collaboration stratégique dans le domaine du test automobile
18/02/2021
Rohde & Schwarz et AVL ont intensifié leur collaboration en intégrant une solution de test radar de Rohde & Schwarz à la chaîne d'outils DRIVINGCUBE™ d’AVL. Ce qui offre de nouvelles possibilités de tester, sur un banc d'essai de type vehicle-in-the-loop, des fonctions radar exploitées par les systèmes avancés d’aide à la conduite (ADAS) et de valider des fonctions de conduite autonome. Il est désormais possible de générer et de tester des scénarios de conduite complexes de façon reproductible et sans risque.
Les complexes systèmes avancés d'aide à la conduite (ADAS) et les fonctions de conduite autonome (AD) telles que le freinage d'urgence, la régulation de vitesse adaptative et le contrôle autonome du véhicule sur autoroutes, doivent être validés dans tous les scénarios de conduite et conditions environnementales possibles.
Ce qui exige la mise en œuvre d’une très grande quantité de validations fonctionnelles et non fonctionnelles. Cela n’est pas sans risque lorsque de tels essais doivent être réalisés sur route. Sans compter que les applications de conduite autonome soulèvent de tels défis qu’il est souvent impossible de procéder à des essais conventionnels sur route en conditions réelles. Pour remédier à cette problématique, les méthodes d'essais sont virtualisées en déployant une approche de type "X-in-the-loop" (XIL) telle que celle proposée par AVL avec sa solution DRIVINGCUBETM .
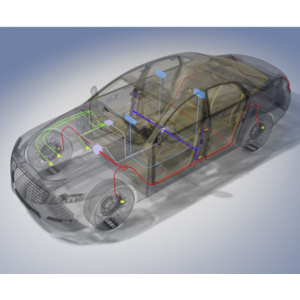
La solution DRIVINGCUBE™ d’AVL associe la simulation logicielle à de réels essais réalisés sur un véhicule installé sur un banc d’essais moto-propulsé et instrumenté. Ce qui permet d'accélérer le processus de validation et d'approbation des systèmes avancés d'aide à la conduite (ADAS) et de conduite autonome (AD). L’élément différenciateur de cette solution est sa capacité à faire fonctionner un véhicule réel dans un environnement virtuel, en prenant en compte toutes les actions de la chaîne d’analyse et de décision : "percevoir, planifier, agir". La fusion de l'environnement virtuel avec de véritables capteurs nécessite une technologie de simulation avancée. Les conditions d’essais diffèrent en effet totalement de celles rencontrées lors d’essais menés sur un banc de laboratoire traditionnel exploitant les données de capteurs isolés.
Après leur collaboration dans le domaine de la simulation de systèmes de géolocalisation GNSS, AVL et Rohde & Schwarz poursuivent maintenant leur développement dans le cadre de la simulation de cibles radar à partir de la plate-forme DRIVINGCUBE™ d’AVL.
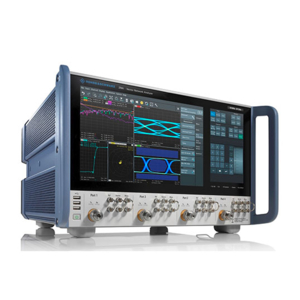
Le système de test radar de Rohde & Schwarz, déployé dans le cadre d’un bancs d'essai de type vehicle-in-the-loop, offre de nouvelles perspectives pour le test des fonctions radar de systèmes avancés d'aide à la conduite (ADAS) et pour s’assurer de la sûreté des fonctions de conduite autonome. Le réseau d'antennes, en s’appuyant sur une technologie innovante, permet de générer des objets artificiels complexes pour les capteurs radar. Les paramètres, tels que la distance et la vitesse radiale, la taille et l’azimut, peuvent être modifiés sans déplacer physiquement les antennes ou les autres éléments. Une interface temps réel adaptable et une intégration transparente à la chaîne d'outils de test virtuel d'AVL permettent de générer et de tester des scénarios de conduite difficiles, complexes et risqués. Le système est tout aussi évolutif que modulaire. Le même banc d'essai peut donc être utilisé pour tester tous types de véhicules avec différents nombres et variétés de capteurs radar. La solution est mise en œuvre pour la validation de diverses applications : régulateur de vitesse adaptatif (ACC), aide au maintien de la trajectoire (LKA) et autres fonctions des systèmes avancés d'aide à la conduite (ADAS) et de conduite autonome (AD). Les scénarios Euro NCAP peuvent en outre être validés dans un environnement reproductible et sûr.
Cette collaboration stratégique entre l'AVL et Rohde & Schwarz fournit une alternative inédite pour le test et la validation des fonctions radar des systèmes avancés d'aide à la conduite (ADAS) et de conduite autonome (AD).