Système d'assistance robotique autonome pour l'équipement automatique de grilles de bobine
21/03/2022
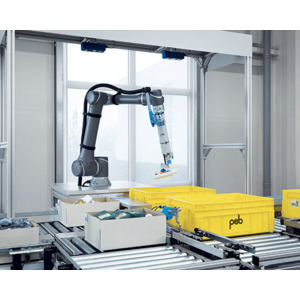
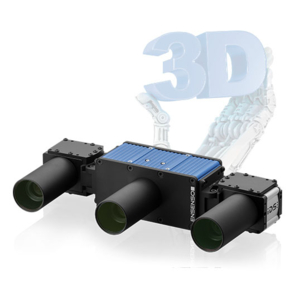
Pour répondre aux exigences croissantes dans des environnements de production évolutifs et en mutation vers une production entièrement automatisée et intelligemment connectée, l'entreprise ONTEC Automation GmbH de Naila en Haute-Franconie (Bavière) a développé un système d'assistance robotique autonome. Le « Smart Robot Assistant » exploite ainsi les synergies entre mobilité et automatisation : il se compose d'une plateforme intralogistique performante et efficace, d'un bras robotisé flexible ainsi que d'un système de caméra stéréo 3D robuste de la série Ensenso N d'IDS Imaging Development Systems GmbH.
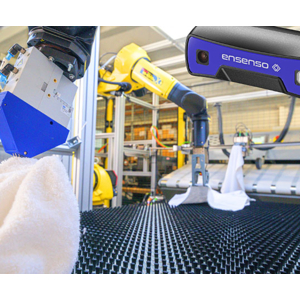
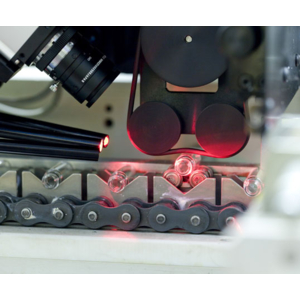
Cette solution est polyvalente et prend en charge, par exemple, des tâches monotones et lourdes de préparation et d'équipement. Le système de transport autonome convient pour le levage au niveau du sol d'europalettes jusqu'au format conteneur ou industriel, ainsi que de conteneurs grillagés de différentes tailles avec une charge maximale de 1 200 kilogrammes. Pour un client du secteur textile, l'AGV (Automated Guided Vehicle, véhicule guidé automatisé) sert à équiper automatiquement des grilles de bobines. Pour cela, il prend des palettes de bobines de fil, les transporte vers la grille prévue à cet effet et équipe cette dernière pour la suite du traitement. Grâce à un système de préhension spécialement développé, 1 000 bobines de fil maximum sont ainsi prélevées par équipe de 8 heures et glissées sur une pointe de la grille. Le schéma de finition et la position des bobines sont enregistrés au moyen d'une caméra 3D Ensenso (série N45) installée sur le bras de préhension.
Les palettes chargées de bobines de fil industriel sont prélevées au sol depuis un emplacement prédéfini et transportées jusqu'à la grille. Là, le préhenseur se positionne verticalement au-dessus de la palette. Un déclencheur d'image est envoyé à la caméra 3D Ensenso de la série N45, déclenché par le logiciel maison ONTEC SPSComm. Il se met en réseau avec l'API du véhicule et peut ainsi lire et transmettre des données. Dans le cas d'une application, SPSComm régule la communication entre les parties logicielles du véhicule, du préhenseur et de la caméra. Cela permet à la caméra de savoir quand le véhicule et le préhenseur sont en position pour une prise de vue. La caméra capture une image et transmet un nuage de points à une solution logicielle d'ONTEC basée sur le logiciel standard HALCON, qui communique au robot les coordonnées des bobines sur la palette. Le robot peut ensuite prendre les bobines correctement et les traiter. Dès que le préhenseur a enlevé une couche de bobines de fil, la caméra Ensenso capture une image du matériau d'emballage qui se trouve entre les bobines de fil et fournit aussi des nuages de points de ce matériau. Ces nuages de points sont traités de manière analogique afin de fournir au robot les informations permettant à un préhenseur à aiguille de retirer les protections.
« Grâce à cette approche, il n'est pas nécessaire de définir à l'avance le nombre de couches et les modèles de finition des palettes, et même les palettes incomplètes peuvent être traitées sans problème », explique Tim Böckel, développeur logiciel chez ONTEC. « Le préhenseur n'a pas besoin d'être converti pour l'utilisation du préhenseur à aiguilles. Pour cette application, il dispose d'un composant de préhension normal pour les bobines et d'un composant de préhension à aiguilles pour les protections intercalaires. »
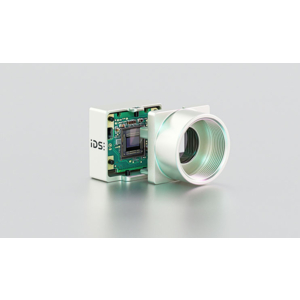
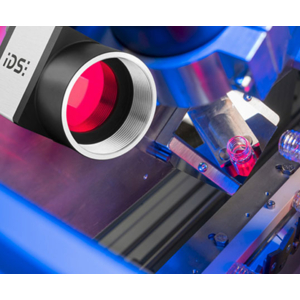
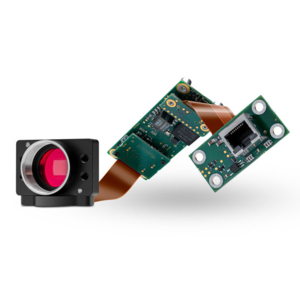
Pour cette tâche, grâce à sa forme compacte, la caméra 3D Ensenso est adaptée à un usage mobile pour la capture 3D d'objets mobiles et statiques sur le bras du robot. L'électronique stéréo 3D de l'Ensenso N 45 est entièrement découplée du boîtier, ce qui permet d'utiliser un composite plastique léger comme matériau de boîtier. Son faible poids facilite son utilisation sur des bras robotisés comme celui du Smart Robotic Assistant. La caméra est également capable de faire face à des conditions environnementales exigeantes. « Les défis de cette application résident surtout dans les différentes conditions d'éclairage, qui se manifestent dans divers espaces du hall et à des moments variés de la journée », décrit Tim Böckel. Cependant, même dans des conditions d'éclairage difficiles, le projecteur intégré de la caméra projette une texture contrastée sur l'objet à représenter et complète ainsi les structures absentes ou peu présentes à sa surface. Ainsi, la caméra intégrée répond exactement aux exigences.
« Grâce à la préconfiguration au sein de NxView, la tâche a pu être menée à bien. » Cet exemple de programme avec code source démontre les fonctions principales de la bibliothèque NxLib, qui permet d'ouvrir une ou plusieurs caméras stéréo et couleur, dont les données d'image et de profondeur sont visualisées. Les paramètres tels que le temps d'exposition, le compartimentage, l'AOI et la plage de mesure de la profondeur peuvent être adaptés en direct - comme dans ce cas - pour la méthode de correspondance appliquée.
La méthode de correspondance permet à la caméra 3D Ensenso de reconnaître un très grand nombre de pixels, y compris leur changement de position, grâce aux structures auxiliaires projetées sur la surface, et de produire ainsi une information complète et homogène sur la profondeur de la scène. Cela garantit ensuite la précision nécessaire avec laquelle le Smart Robot Assistant procède. Les autres critères de sélection de la caméra étaient, entre autres, l'interface de vision standard Gigabit Ethernet ainsi que le capteur à obturateur global (Global Shutter) 1,3 MP. « La caméra ne prend qu'une seule image de l'ensemble de la palette au profit d'un temps de passage plus rapide, mais elle doit fournir les coordonnées à une distance relativement grande avec une précision de l'ordre du millimètre afin de permettre au bras du robot de saisir la palette avec exactitude », explique Matthias Hofmann, informaticien spécialisé dans le développement d'applications chez ONTEC. « Nous avons donc besoin de la haute résolution de la caméra pour pouvoir enregistrer en toute sécurité les bords des bobines avec la caméra 3D ». La localisation des bords est importante pour pouvoir transmettre la position la plus précise possible du centre de la bobine au préhenseur.
En outre, la caméra a été spécialement conçue pour une utilisation dans des conditions environnementales difficiles. Elle est dotée d'un connecteur GPIO à visser pour le déclencheur et le flash, elle est protégée contre la saleté, la poussière, les projections d'eau ou les produits de nettoyage par la classe IP65/67.
Logiciel
Le kit de développement logiciel Ensenso (SDK) permet le calibrage main-œil de la caméra par rapport au bras du robot, ce qui facilite la translation ou le déplacement des coordonnées à l'aide de la pose du robot. De plus, en utilisant les paramètres internes de la caméra, une « FileCam » de la situation actuelle est enregistrée à chaque passage, c'est-à-dire à chaque déclenchement d'image. Cela permet par la suite de reproduire facilement d'éventuels cas litigieux, dans ce cas d'application par exemple des conditions d'éclairage inattendues, des obstacles sur l'image ou encore un positionnement inattendu des bobines dans l'image. Le kit de développement logiciel Ensenso (SDK) permet également de sauvegarder et d'archiver les fichiers LOG de la caméra interne pour une éventuelle évaluation.
ONTEC utilise également ces « FileCams » pour vérifier de manière automatisée les cas de test et garantir ainsi le bon fonctionnement de toutes les constellations lors des adaptations du logiciel de vision. De plus, la commande de guidage développée par ONTEC permet de coordonner différents véhicules et de minimiser les goulots d'étranglement logistiques. Différents assistants peuvent ainsi être déplacés dans un espace restreint et agir simultanément. L'utilisation de l'outil d'interface industrielle ONTEC SPSComm permet d'intégrer en toute sécurité des robots industriels standard dans l'application globale et d'échanger des données entre les différents systèmes.
Perspectives
Un développement du système est prévu, notamment en ce qui concerne la navigation du véhicule autonome. « En ce qui concerne la navigation de nos véhicules guidés automatisés (AGV), l'utilisation de caméras IDS est très intéressante. Nous évaluons actuellement l'utilisation de la nouvelle série S Ensenso pour permettre au véhicule de réagir de manière encore plus flexible, par exemple aux obstacles, de les classifier et éventuellement de les contourner », explique Tim Böckel, développeur de logiciels chez ONTEC, en esquissant la prochaine étape de développement.
La configuration d'interface propre à ONTEC permet d'ores et déjà d'intégrer le système dans les applications les plus diverses de l'industrie 4.0. La structure modulaire de la solution robotisée autonome laisse la place à une adaptation aux tâches les plus variées. Ainsi, elle ne sert pas seulement à augmenter l'efficacité et la flexibilité de la production et de la logistique, mais contribue aussi, dans de nombreux endroits, à soulager les collaborateurs au sens propre du terme.