Un système de vision IDS au sein du robot de prélèvement « autopick »
12/12/2021
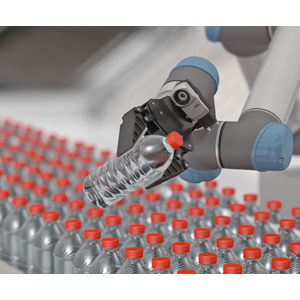
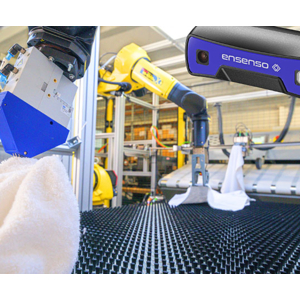
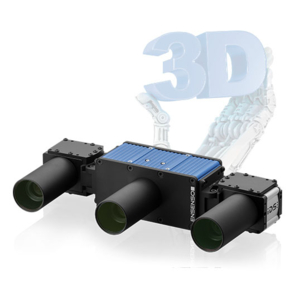
Destiné à prélèver des produits inconnus dans des matériaux en vrac et les dépose dans le conteneur cible, le robot de prélèvement « autopick » de la société psb intralogistics intégrent 2 caméras 3D Ensenso fournissent au système les données d'image essentielles
La solution entièrement automatisée pour le prélèvement d'articles individuels se compose essentiellement d'un robot avec pince, du réseau informatique de l'ensemble de l'installation et d'un système de traitement d'images performant
Application
Le système de vision agit comme l'œil du robot. Il reconnaît les surfaces saisissables sur les objets à traiter dans le conteneur source et calcule les points de saisie et les trajectoires sans collision pour le robot. Il peut ainsi prélever des produits inconnus directement dans le vrac et les placer dans le conteneur cible dans la zone la moins remplie. Les ventouses permettent de saisir les objets correspondants en douceur. Un « apprentissage » (teach-in) préalable des différents produits n'est pas nécessaire. Qu'il s'agisse de bouteilles de médicaments ou d'emballages de thé, la pince multifonctionnelle peut être conçue individuellement pour une grande variété d'articles avec différentes unités d'emballage. Le système apprend au fil du temps laquelle des différentes prises fonctionne le mieux pour chaque article. La performance de prélèvement réalisable pour une installation sécurisée par le processus dépend fortement des caractéristiques des objets à saisir et se situe entre 300 et 500 pièces par heure.
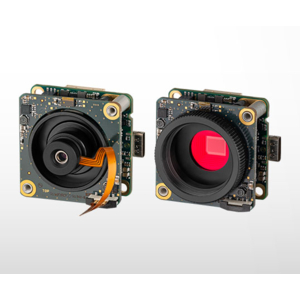
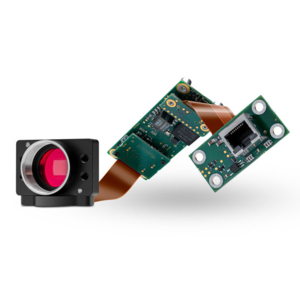
Deux caméras de vision 3D du type Ensenso N35 fournissent au système les données d'image nécessaires. Elles fonctionnent selon le mode « Projected Texture Stereo Vision ». Chaque modèle utilise deux capteurs CMOS et un projecteur, qui projette des structures de soutien sur l’objet à acquérir - même dans des conditions d'éclairage difficiles. Le mode suit donc le principe de la vision spatiale (stéréovision), qui est inspirée de la vision humaine. Le résultat est un nuage de points 3D qui sert de base aux informations spatiales requises sur les objets.
Pour l'intégration des caméras dans autopick, psb intralogistics a utilisé le kit de développement logiciel Ensenso (SDK). Outre l'assistant pour une configuration simple et une assistance lors du calibrage des caméras 3D, il existe la possibilité de traiter encore plus rapidement les données 3D avec des processeurs graphiques.
Cela permet également de produire un seul nuage de points 3D à partir de toutes les caméras utilisées dans les applications à caméras multiples ainsi que de composer en direct des nuages de points 3D depuis différentes perspectives.
La première caméra est installée au-dessus de la boîte source afin de pouvoir la considérer comme un objet de collision dans la planification de la trajectoire du bras du robot. Ici, les parties inconnues sont présentées et le nuage de points pour la recherche du point de saisie est généré. Ce nuage est réalisé à l'aide du logiciel Mikado ARC (Adaptive Robot Control) d'isys vision. Il combine la technologie de caméra stéréovision 3D d'Ensenso avec une commande de robot adaptative facilement configurable. Le résultat est une solution complète de vision robotique en 3D pour le prélèvement dans des bacs et la manipulation de pièces avec un robot autonome, tel que fourni par autopick. Au lieu de suivre des trajectoires prédéfinies, apprises et fixes, il s'oriente de manière indépendante dans l'espace de travail et réagit à chaque situation.
La deuxième caméra est située au-dessus de la boîte cible. Les positions de stockage libres sont recherchées ici. De plus, la hauteur Z du contenu de la caisse est calculée afin de pouvoir en tenir compte lors de la détermination de la position de stockage. Une occupation régulière de la boîte cible ainsi qu'une dépose délicate des produits constituent un facteur décisif. Ce dernier point est particulièrement important lors du prélèvement de pièces fragiles. L'acquisition d'images s'effectue de manière asynchrone par rapport au mouvement du robot afin de pouvoir travailler de manière optimisée en termes de temps de cycle.
« La configuration de la caméra peut être ajustée facilement et précisément à la gamme de produits correspondante ou même adaptée pendant le processus », explique le responsable du système chez psb intralogistics. Les informations sur la saisie et les ordres de prélèvement sont échangés via l'interface du système de gestion d'entrepôt.
Perspectives
Le commerce en ligne poursuit sa forte croissance. Dans le même temps, le secteur du commerce électronique devient de plus en plus compétitif. Des technologies intralogistiques innovantes sont donc souvent nécessaires pour rester compétitif. Par ailleurs, il n'y a guère d'autre secteur de l'économie qui soit autant confronté au manque de jeunes talents que la logistique. L'avantage économique des robots de prélèvement est donc si élevé qu'ils auront une place permanente dans la préparation des commandes à moyen ou long terme. Les solutions sous-jacentes dotées d'intelligence artificielle apprendront à maîtriser d'autres défis que la préhension - de manière autonome ou en collaboration avec des humains, de manière fiable et précise. Le traitement d'images, notamment avec des caméras 3D, fournit la vue d'ensemble décisive ainsi que la sécurité nécessaire.