Manipulateur pneumatique de portes et ventaux sur chemin de roulement vertical
19/07/2019
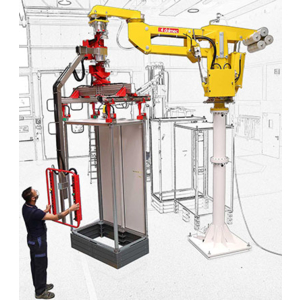
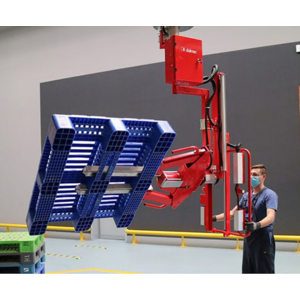
Ce nouveau manipulateur industriel développé par Dalmec permet la préhension et le déplacement de portes et de ventaux de formes et de tailles diverses, sans effort pour l'opérateur, grâce à un chemin de roulement vertical adapté.
Ce chemin est constitué par deux rails en profilés U en aluminium opposés, reliés par entretoises de renfort. Les pattes d’accrochage à la structure existante et les butées de fin de course complètent l’installation.
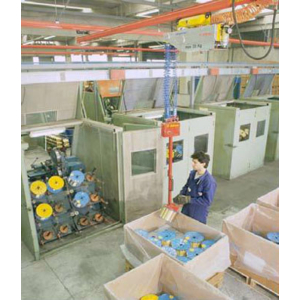
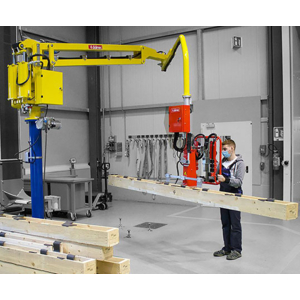
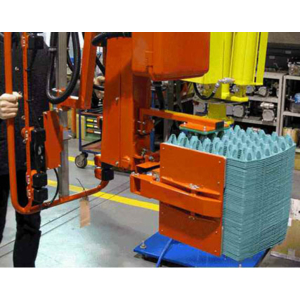
Un dispositif de préhension a été développé sur-mesure par Dalmec pour opérer une saisie aisée et sans contrainte des portes, grâce à un système à ventouses associé au manipulateur Dalmec type Partner Equo. Ce système permet ainsi de manipuler des charges d'un poids de 550 kg max et son rayon d'action est de 4000 mm, pour une vitesse de levage de 0.5 m/seconde.
Ainsi, cet outil permet la préhension pour une manipulation en en position horizontale de portes de formats variés, la rotation et l’inclinaison de celles-ci, leur déplacement pour un dépôt sur le point de montage, et ce en toute sécurité et sans le moindre effort pour l’opérateur.
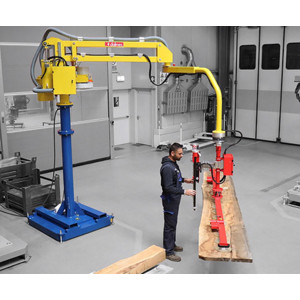
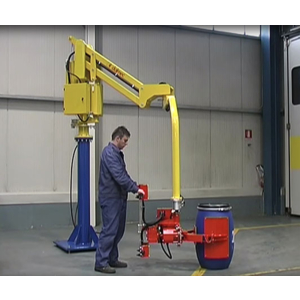
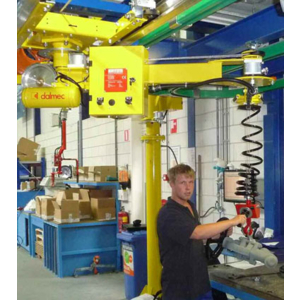
Conçu sur mesure, le dispositif de préhension de ce nouveau manipulateur a été développé par Dalmec. Il repose sur un manipulateur pneumatique PARTNER EQUO à bras articulé qui est particulièrement adapté pour la manipulation, en absence d’effort, de produits dont le centre de gravité est déporté par rapport à l’axe vertical du bras terminal. Sa structure modulaire a été conçue pour résister aux torsions engendrées par ce type de sollicitation.
Autres actualités Dalmec





























Une année 2022 bien remplie pour Dalmec



Manipulateur à fourches pour palettes
















Manipulateur pour palettes plastiques






















Manipulateur inox pour zones stériles










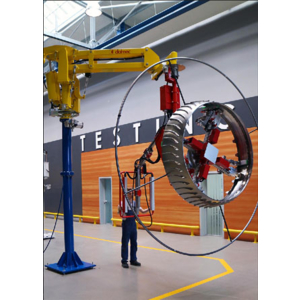





Manipulateur pour anneaux métalliques

Manipulateur «POSIFIL PF» pour sacs


Manipulateur pneumatique pour réservoirs






Manipulateur pour emballages alimentaires


Manipulateur pneumatique pour bouteillles

Manipulateur Filoguidé

Manipulateur de cartons d'emballages

Nouveau manipulateur pour multi-bobines

Manipulateur pour plaques de tôle

Manipulateur pour sacs alimentaires


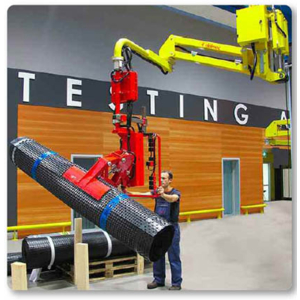
Manipulateur PARTNER EQUO PE pour bobines





Manipulateurs pour bobines

Manipulateur pneumatique Partner EQUO®


Manipulateur tout en INOX

Manipulateur pour sac PARTNER PS


Manipulateur industriel Atex

Manipulateur pour panneaux de Tôle


Manipulateur pour zone explosive

Nouveau manipulateur de palettes





Manipulateur de fûts en milieu explosif