Manipulateur pour sac PARTNER PS
04/09/2013
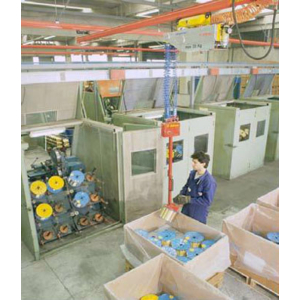
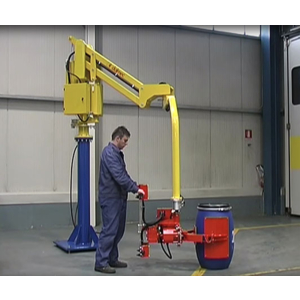
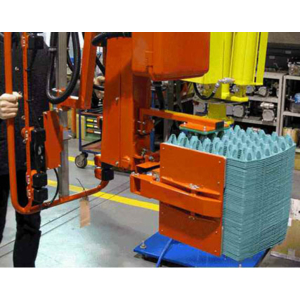
Ce nouveau manipulateur à bras rigide, équipé dʼun outil de préhension pneumatique, permet la manipulation itérative de sacs toute enveloppe et à contenant très divers (ciment, farine, cacao, graine...)
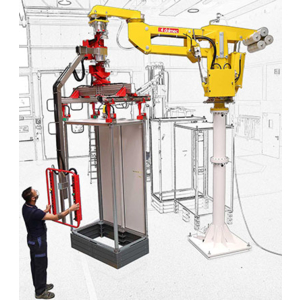
Le manipulateur pneumatique pour sac de type PARTNER PS est équipé d’un dispositif de préhension pneumatique (pince, ventouse, ...), alimenté par une turbine électrique permettant la prise, le transfert et l’inclinaison de sacs, de formes, de contenant, de poids et de dimensions très variées, avec une très grande facilité de manoeuvre, permettant à l’opérateur de déplacer tout type de sacs, dans tous les points du volume de travail, avec rapidité, précision et en toute sécurité.
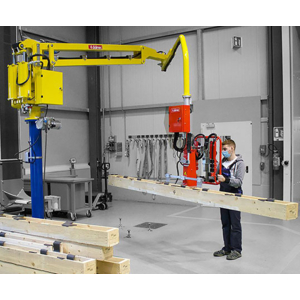
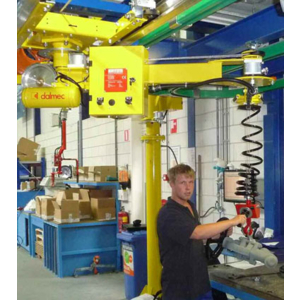
Ce manipulateur permet à l’utilisateur de déplacer sa charge dans toutes les directions de l’espace, sans effort, avec rapidité et précision, dans des conditions optimales d’ergonomie et de sécurité.
Pourvu d’un appareillage pneumatique à bras rigides, le manipulateur DALMEC type PS répond parfaitement à la préhension et à la manutention en “état d’apesanteur” de tout type de sacs aux enveloppes diverses (papier, plastique, toile de jute, ...).
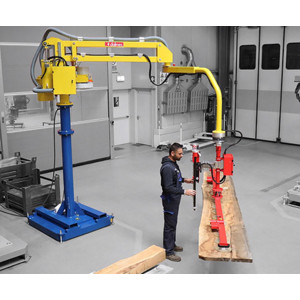
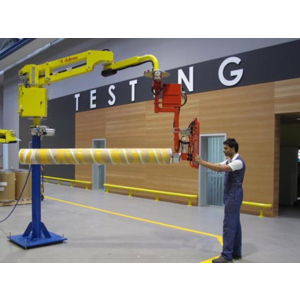
L’équilibrage de la charge est obtenu par l’effet d’un vérin pneumatique sur un système à leviers. Le vérin amplifie l’action de montée et de descente qui est appliquée manuellement par l’opérateur sur l’outil de préhension ou directement sur la charge. Le vérin est alimenté par deux circuits préréglés : le premier équilibre en permanence l’outil de préhension, le second équilibre les différents poids de la charge.
Profitant de systèmes de préhension conçus et réalisés aux mesures spécifiques de la charge à manipuler, les caractéristiques géométriques du manipulateur DALMEC type PS ont été particulièrement étudiées de manière à pouvoir s’adapter complètement aux différents besoins de l’utilisateur et à l’environnement de travail.
Autres actualités Dalmec





























Une année 2022 bien remplie pour Dalmec



Manipulateur à fourches pour palettes
















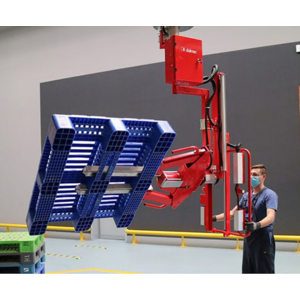
Manipulateur pour palettes plastiques























Manipulateur inox pour zones stériles










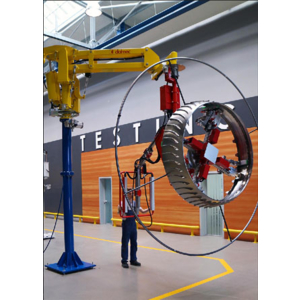





Manipulateur pour anneaux métalliques

Manipulateur «POSIFIL PF» pour sacs


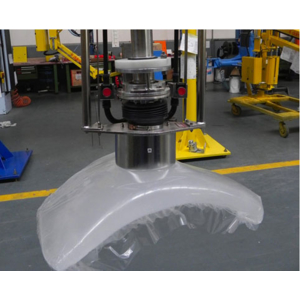
Manipulateur pneumatique pour réservoirs






Manipulateur pour emballages alimentaires


Manipulateur pneumatique pour bouteillles

Manipulateur Filoguidé

Manipulateur de cartons d'emballages

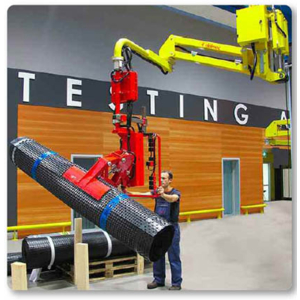
Nouveau manipulateur pour multi-bobines

Manipulateur pour plaques de tôle

Manipulateur pour sacs alimentaires


Manipulateur PARTNER EQUO PE pour bobines





Manipulateurs pour bobines

Manipulateur pneumatique Partner EQUO®


Manipulateur tout en INOX


Manipulateur industriel Atex

Manipulateur pour panneaux de Tôle


Manipulateur pour zone explosive

Nouveau manipulateur de palettes





Manipulateur de fûts en milieu explosif