Nouveaux manipulateurs pneumatiques DALMEC POSIFIL PF
21/06/2011
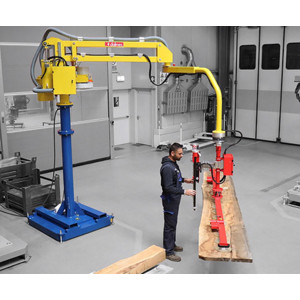
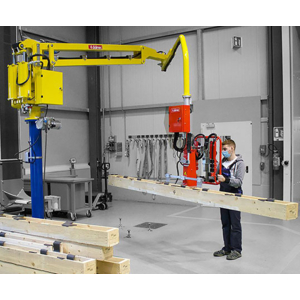
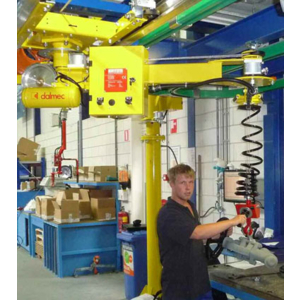
Cette nouvelle gamme de manipulateurs pneumatiques est particulièrement adaptée pour la manipulation manuelle de charges légères à moyennes, en absence totale d’effort, et dans toutes les directions de l’espace.
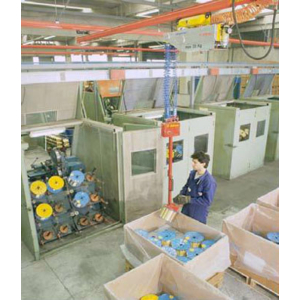
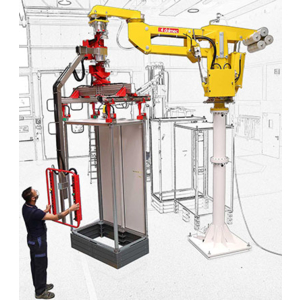
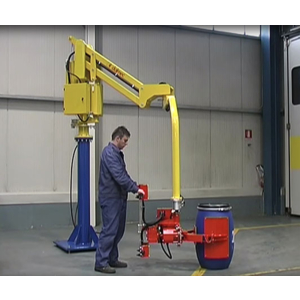
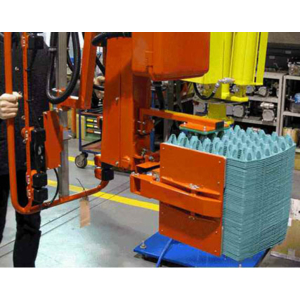
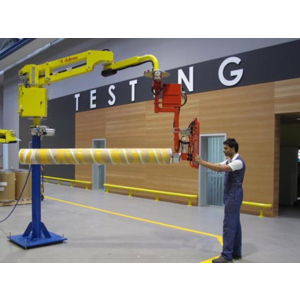
Ces manipulateurs pneumatiques se distinguent par une structure à double bras articulé avec articulation intermédiaire, ce qui assure à l’opérateur une grande souplesse et une parfaite précision des mouvements dans tout le volume de travail et pour tout type d’application industrielle … sans le moindre effort et en totale sécurité ! Afin de répondre aux demandes de grandes cadences sollicitées par les chaînes de productions industrielles, ce nouveau manipulateur est équipé d’un dispositif de préhension, proposé à pince pneumatique, à ventouses, à aimant ou à crochet, adaptables selon les caractériques de la charge à saisir.
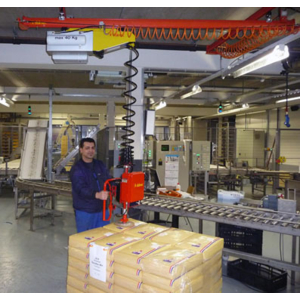
L’appareillage pneumatique du système favorise parfaitement la préhension et la manutention en “état d’apesanteur” de tout type de poids et de volume. L’équilibrage de la charge est obtenu par l’effet d’un vérin pneumatique à air comprimé sur un système à leviers. Le vérin amplifie l’action de montée et de descente qui est appliquée manuellement par l’opérateur sur l’outil de préhension ou directement sur la charge. Le vérin est alimenté par deux circuits préréglés : le premier équilibre en permanence l’outil de préhension, le second équilibre les différents poids de la charge.
Pour répondre aux différents besoins de manipulations industrielles du marché, la nouvelle gamme de manipulateurs pneumatiques POSIFIL PF est proposée en trois variantes distinctes adaptées selon les contraintes de l’environnement de travail et de la zone à couvrir
Autres actualités Dalmec





























Une année 2022 bien remplie pour Dalmec



Manipulateur à fourches pour palettes
















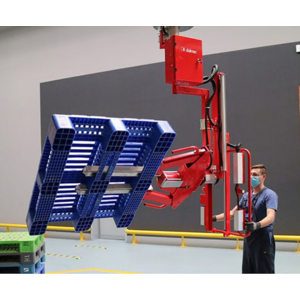
Manipulateur pour palettes plastiques























Manipulateur inox pour zones stériles










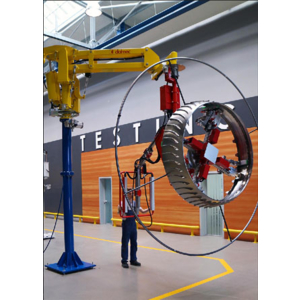





Manipulateur pour anneaux métalliques

Manipulateur «POSIFIL PF» pour sacs


Manipulateur pneumatique pour réservoirs






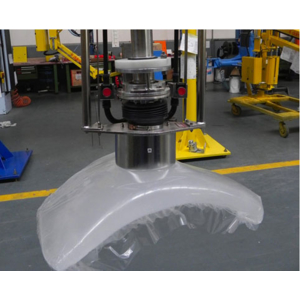
Manipulateur pour emballages alimentaires


Manipulateur pneumatique pour bouteillles

Manipulateur Filoguidé

Manipulateur de cartons d'emballages

Nouveau manipulateur pour multi-bobines

Manipulateur pour plaques de tôle

Manipulateur pour sacs alimentaires


Manipulateur PARTNER EQUO PE pour bobines





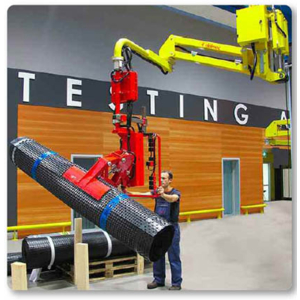
Manipulateurs pour bobines

Manipulateur pneumatique Partner EQUO®


Manipulateur tout en INOX

Manipulateur pour sac PARTNER PS


Manipulateur industriel Atex

Manipulateur pour panneaux de Tôle


Manipulateur pour zone explosive

Nouveau manipulateur de palettes




Manipulateur de fûts en milieu explosif