Manipulateur pour roues de véhicules industriels
25/09/2010
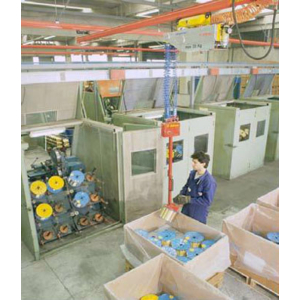
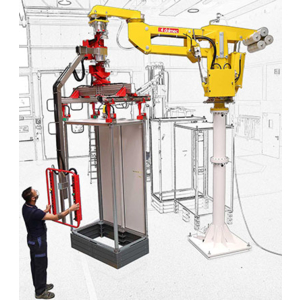
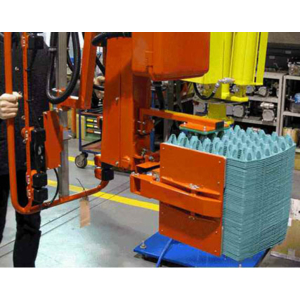
Le nouveau manipulateur PARTNER PM, a été conçu pour répondre à des besoins spécifiques de manipulation en " état d'apesanteur”, de roues pour leur montage en chaîne de production , sur véhicules industriels (camions , tracteurs . . ).
le manipulateur DALMEC PM, offre à son utilisateur la possibilité de pouvoir soulever et déplacer sans aucun effort et avec une sécurité maximale, des roues destinées à être montées en chaîne de production sur des véhicules industriels (camions, tracteurs, ...), en les maniant sans aucune contrainte et en totale sécurité, avec une extrême aisance et une très grande précision !
Pour parfaire sa manipulation, le manipulateur est équipé d’un dispositif de préhension. Véritable prolongement de la main, l’outil de préhension, spécialement étudié en fonction de la pièce à manipuler et des opérations à effectuer sur le poste de travail, va assister l’opérateur de la prise jusqu’à la dépose finale en apportant la précision nécessaire à toute opération de montage sur véhicule.
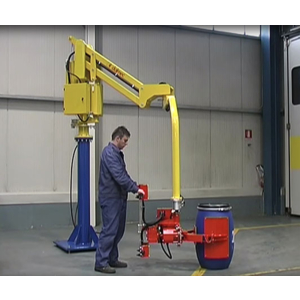
L’outil de préhension va également imprimer à la roue tous les mouvements nécessaires à son montage sur le véhicule comme le basculement de la roue, son inclinaison ou sa rotation autour d’elle-même qui va faciliter son centrage sur le point d’appui. Ces mouvements sont soit obtenus par le jeu de vérins pneumatiques ou manuellement par simple action de l’opérateur sur un volant.
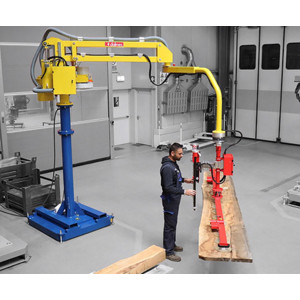
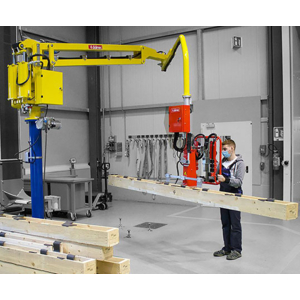
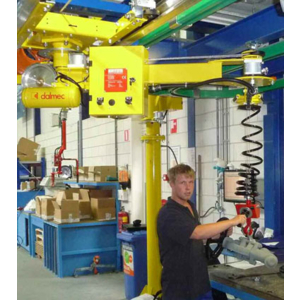
La structure même du manipulateur est conçue pour permettre les manipulations de charges en porte-à faux dans tous les points du volume de travail, sans effort, et dans des conditions optimales de sécurité.
Chaque installation est le fruit d’une analyse ergonomique du poste de travail. Le cadre de commandes est conçu de manière à éviter toutes contraintes posturales à l’opérateur quelle que soit la hauteur de prise ou de dépose de la pièce manipulée.
Tous les mouvements dans l’espace sont libres, et obtenus par action directe de l’opérateur sur la charge ou sur l’outil, conférant ainsi aux gestes la précision nécessaire à la manipulation de roues pour leur montage sur véhicules.
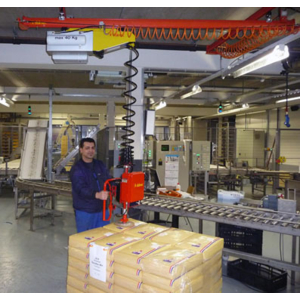
L’équilibrage de la charge est obtenu par l’effet d’un vérin pneumatique sur un système à levier. Le vérin amplifie l’action de montée et de descente qui est appliquée manuellement par l’opérateur sur l’outil de préhension ou directement sur la charge. Le vérin est alimenté par deux circuits préréglés : le premier équilibre en permanence l’outil de préhension, alors que le second équilibre les différents poids de la charge
Autres actualités Dalmec





























Une année 2022 bien remplie pour Dalmec



Manipulateur à fourches pour palettes
















Manipulateur pour palettes plastiques























Manipulateur inox pour zones stériles










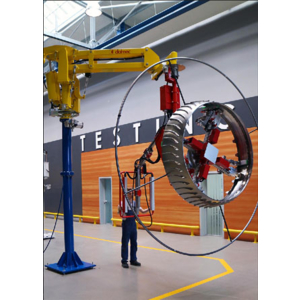





Manipulateur pour anneaux métalliques

Manipulateur «POSIFIL PF» pour sacs


Manipulateur pneumatique pour réservoirs






Manipulateur pour emballages alimentaires


Manipulateur pneumatique pour bouteillles

Manipulateur Filoguidé

Manipulateur de cartons d'emballages

Nouveau manipulateur pour multi-bobines

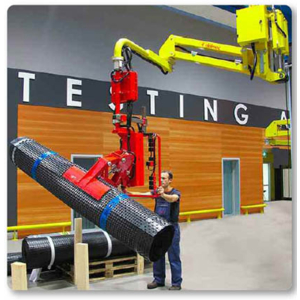
Manipulateur pour plaques de tôle

Manipulateur pour sacs alimentaires


Manipulateur PARTNER EQUO PE pour bobines





Manipulateurs pour bobines

Manipulateur pneumatique Partner EQUO®


Manipulateur tout en INOX

Manipulateur pour sac PARTNER PS


Manipulateur industriel Atex

Manipulateur pour panneaux de Tôle


Manipulateur pour zone explosive

Nouveau manipulateur de palettes




Manipulateur de fûts en milieu explosif