Manipulateur “MicroPartner” pour Machines-Outils
08/09/2009
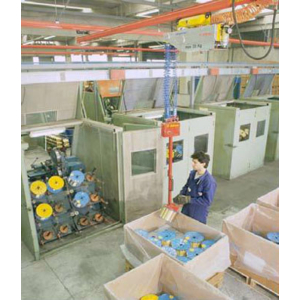
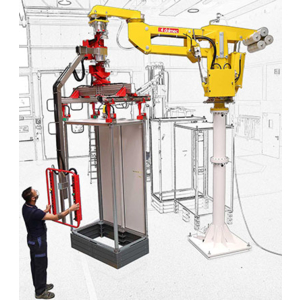
Un manipulateur pneumatique auto-équilibré de type aérien mobile avec chemin de roulement pour le chargement et déchargement de machines-outils
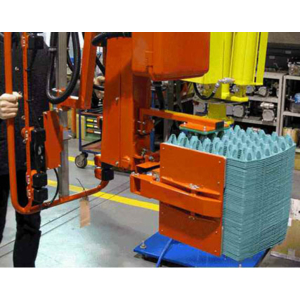
Ce manipulateur est équipé d’un dispositif de préhension à pince pneumatique pour la manipulation de pièces mécaniques afin d’assister un opérateur lors du chargement et du déchargement d’une machine-outil.
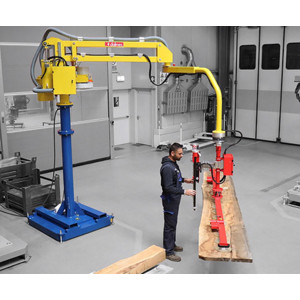
L’outil conçu aux mesures de la pièce à manipuler et intégrant les contraintes ergonomiques du poste de travail est équipé d’un groupe de basculement pneumatique.
La structure du manipulateur est particulièrement adaptée pour permettre la manipulation de charges en porte-à-faux.
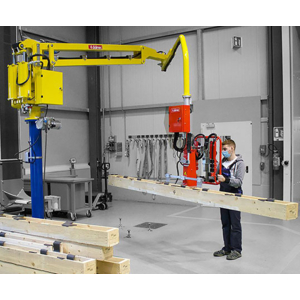
Tous les mouvements dans l’espace sont libres, obtenus par action directe de l’opérateur sur la charge ou sur l’outil conférant aux gestes la précision parfaite nécessaire au positionnement de la pièce dans la machine.
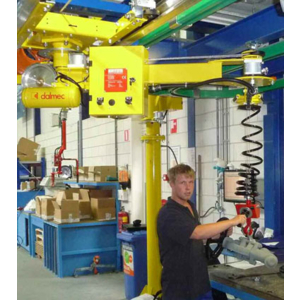
Ce type de manipulateur se caractérise notamment par sa grande maniabilité et souplesse d’utilisation liées à son encombrement réduit. Il est l’instrument idéal pour les manipulations de charges de pièces mécaniques,
en absence d’effort et dans tous les points du volume de travail. Le manipulateur pneumatique MICROPARTNER permet ainsi à l’opérateur de travailler sans fatigue, avec rapidité et précision, dans des conditions optimales d’ergonomie et de sécurité.
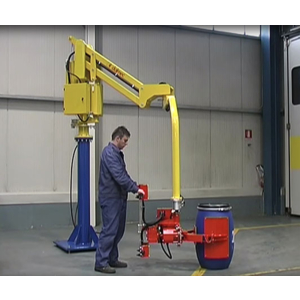
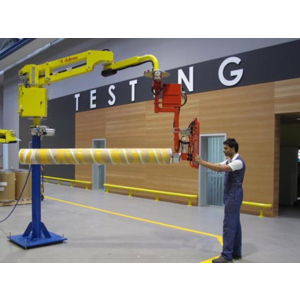
Les outils de préhension associés au MICROPARTNER sont conçus et réalisés aux mesures de la charge à manipuler et des contraintes liées à l’accessibilité du produit et d’une manipulation axée comme en porte-à-faux.
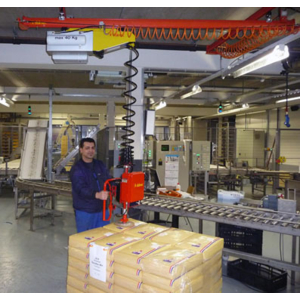
L’équilibrage de la charge est obtenu par l’effet d’un vérin pneumatique sur un système à leviers. Le vérin amplifie l’action de montée et de descente qui est appliquée manuellement par l’opérateur sur l’outil de préhension ou
directement sur la charge. Le vérin est alimenté par deux circuits préréglés : le premier équilibre en permanence l’outil de préhension, le second équilibre les différents poids de la charge.
Le principe d’utilisation est basé sur l’équilibrage de la charge : tous les mouvements dans l’espace sont libres. Aussi, Le mouvement vertical est obtenu par simple action de l’opérateur vers le haut ou vers le bas. L’opérateur maîtrise tous les mouvements imprimés à la charge : les manipulations sont à la fois précises et sûres.
Autres actualités Dalmec





























Une année 2022 bien remplie pour Dalmec



Manipulateur à fourches pour palettes
















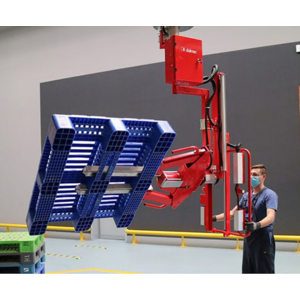
Manipulateur pour palettes plastiques























Manipulateur inox pour zones stériles










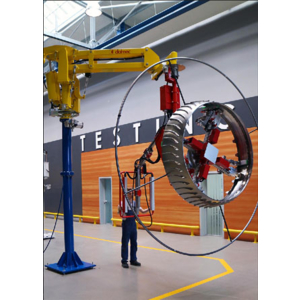





Manipulateur pour anneaux métalliques

Manipulateur «POSIFIL PF» pour sacs


Manipulateur pneumatique pour réservoirs






Manipulateur pour emballages alimentaires


Manipulateur pneumatique pour bouteillles

Manipulateur Filoguidé

Manipulateur de cartons d'emballages

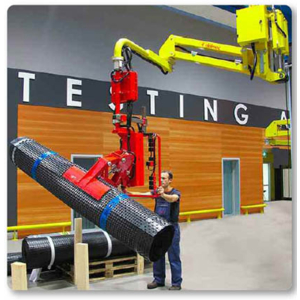
Nouveau manipulateur pour multi-bobines

Manipulateur pour plaques de tôle

Manipulateur pour sacs alimentaires


Manipulateur PARTNER EQUO PE pour bobines





Manipulateurs pour bobines

Manipulateur pneumatique Partner EQUO®


Manipulateur tout en INOX

Manipulateur pour sac PARTNER PS


Manipulateur industriel Atex

Manipulateur pour panneaux de Tôle


Manipulateur pour zone explosive

Nouveau manipulateur de palettes





Manipulateur de fûts en milieu explosif