Dalmec présente une nouvelle solution métier anti-TMS pour la manipulation de fûts en carton
19/10/2023
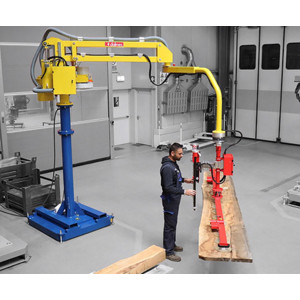
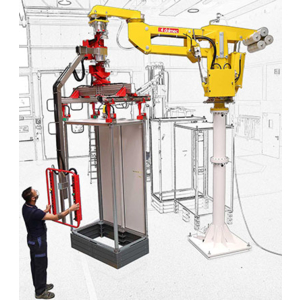
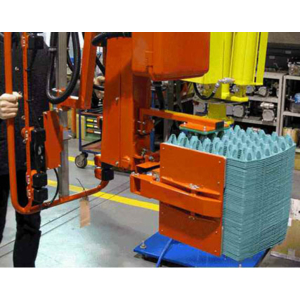
Ce manipulateur ergonomique Partner Equo PEC est équipé d'un dispositif de préhension réglable à ventouses permettant de favoriser le levage, le déplacement et la dépose sur palette de fûts en carton aux dimensions, formes et poids variables.
Afin de permettre une prise maîtrisée et optimale des fûts en carton pouvant atteindre jusqu’à 400 kg selon les produits contenus, l’outil de préhension du manipulateur profite d'un système modulaire à 6 ventouses en ligne adapté avec un vide généré par un injecteur à plusieurs étages de type « Venturi ». Relié au bras terminal du manipulateur l’outil de préhension bénéficie pour ce faire d’un système ingénieux à bras vertical sur lequel sont montées les ventouses permettant la prise, le levage, le déplacement et la dépose des fûts en s’adaptant parfaitement aux proportions de chaque pièce à manipuler, et ce, sans aucun effort !
Dans ce cas précis, le manipulateur Dalmec Partner Equo PEC à bras articulé a été conçu et réalisé pour accomplir des manipulations répétitives et particulièrement minutieuses en offrant un rayon d’action important jusqu'à 3500 mm pour une force max. de 400 Kg. Développé sur mesure aux dimensions de la pièce manipulée, l’outil de préhension à ventouses va quant à lui permettre aisément la saisie des fûts en carton de manière équilibrée tout en les maintenant dans une parfaite position verticale. Enfin, ce nouveau manipulateur s’intègre totalement dans les environnements de travail exigus grâce à sa structure évolutive et aux infinies possibilités de faire varier les formes et les dimensions du bras terminal.
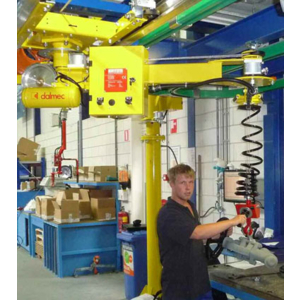
N’utilisant que l’air comprimé comme seule énergie, ce nouveau manipulateur pneumatique offre une grande maniabilité des mouvements pour les utilisateurs. Ainsi, l'opérateur peut déplacer la charge dans tous les points du volume de travail, avec la plus grande facilité et dans des conditions optimales d’ergonomie et de sécurité. Tous les mouvements dans l’espace sont libres et sont obtenus grâce à un effort minimal par simple action directe de l’opérateur sur l’outil de préhension ou simple guidage manuel sur la charge elle-même. Les efforts physiques et les risques de TMS sont ainsi totalement annihilés avec des conditions de travail améliorées, apportant au final un gain de sécurité et de productivité remarquables pour les opérateurs.
Autres actualités Dalmec




























Une année 2022 bien remplie pour Dalmec



Manipulateur à fourches pour palettes
















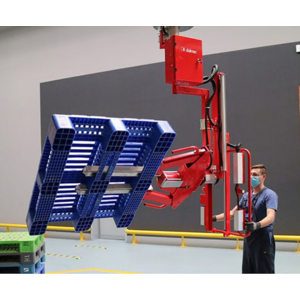
Manipulateur pour palettes plastiques























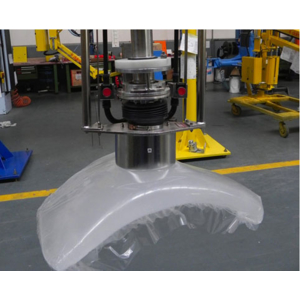
Manipulateur inox pour zones stériles










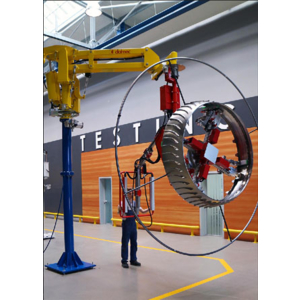





Manipulateur pour anneaux métalliques

Manipulateur «POSIFIL PF» pour sacs


Manipulateur pneumatique pour réservoirs






Manipulateur pour emballages alimentaires


Manipulateur pneumatique pour bouteillles

Manipulateur Filoguidé

Manipulateur de cartons d'emballages

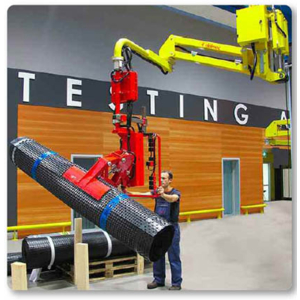
Nouveau manipulateur pour multi-bobines

Manipulateur pour plaques de tôle

Manipulateur pour sacs alimentaires


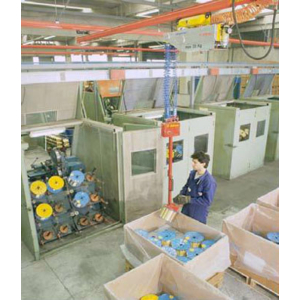
Manipulateur PARTNER EQUO PE pour bobines





Manipulateurs pour bobines

Manipulateur pneumatique Partner EQUO®


Manipulateur tout en INOX

Manipulateur pour sac PARTNER PS


Manipulateur industriel Atex

Manipulateur pour panneaux de Tôle


Manipulateur pour zone explosive

Nouveau manipulateur de palettes





Manipulateur de fûts en milieu explosif