Les moteurs FAULHABER contribuent à la précision des systèmes de transport mobiles d'Evocortex
24/01/2022
À l'ère de l'Internet des objets (IoT) et de l’Industrie 4.0, l'intralogistique joue un rôle de plus en plus important. La précision du transport des matériaux et des marchandises devient un facteur essentiel pour une production efficace. Les systèmes de transport mobiles d'Evocortex accomplissent cette tâche en utilisant des moyens inhabituels. Également déterminante pour la réalisation de leur concept technique créatif : la densité de puissance des moteurs FAULHABER utilisés.
De nos jours, « production » est devenu synonyme de « complexité ». De plus en plus, les produits sont fabriqués selon les spécifications de chaque client ; avec la connectivité IoT, une production entièrement automatisée est déjà possible avec une taille de lot d’une unité. Une telle diversité de variantes nécessite des processus étroitement imbriqués et en même temps très flexibles. Les bonnes pièces et les bons composants - dont la variabilité est presque infinie - doivent être prêts au bon moment aux différents postes de production.
Les AMR ont le vent en poupe
Le transport de matériaux, par exemple entre les points d'approvisionnement et les installations de production, devient donc de plus en plus individuel et doit en même temps être réalisé de manière aussi automatisée que possible. Les plates-formes de robots mobiles, connues dans l’industrie sous le nom de robots mobiles autonomes (AMR, pour Autonomous Mobile Robot), sont donc de plus en plus nombreuses dans les entrepôts et les halles de production du monde entier.
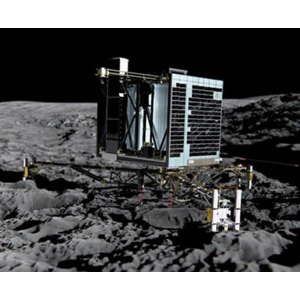
Ce marché est le point de mire de la start-up basée à Nuremberg Evocortex, qui a été fondée en 2016 avec la participation d'experts confirmés en robotique. Étroitement liée à l'université de technologie de Nuremberg voisine ainsi qu'à d'autres établissements d'enseignement et de recherche, l'entreprise est entrée sur le marché avec un tout nouveau concept d’AMR. Avec ses produits, elle propose des solutions créatives et inédites pour répondre aux exigences de l'intralogistique moderne.
« Les AMR conventionnels nécessitent souvent des ajustements géographiques des trajets ou des modifications techniques des processus, explique Hubert Bauer, Directeur général. Par exemple, des marquages optiques sont nécessaires pour que les véhicules puissent s’orienter, les chemins et les croisements doivent respecter des dimensions et des rayons de courbure spécifiques. Nous avons voulu créer un robot de transport qui s'adapte aux besoins du client et non l'inverse. »
L'« empreinte digitale » du sol de l’entrepôt indique la position exacte
Les robots mobiles autonomes (AMR) d'Evocortex n'ont besoin d’aucun système de guidage préinstallé pour reconnaître leur emplacement et trouver le bon chemin. Ils s'orientent tout simplement au moyen des irrégularités du sol de l’entrepôt. En effet, même des sols en béton lisse ordinaires présentent des irrégularités qui sont saisies par la caméra haute résolution du robot. Cette caméra située sous le véhicule capture une surface de 10 x 10 centimètres et utilise les données de l'image pour créer un genre d’empreinte digitale du sol de l’entrepôt. Derrière ce système sophistiqué se trouve le module de localisation (ELM) développé par Evocortex.
Au cours de l'apprentissage initial, le robot parcourt tout l’entrepôt en suivant une grille. Grâce à des algorithmes complexes, une carte très précise est établie à partir d'un réseau de points individuels. À l'avenir, l'intelligence artificielle devrait permettre de réaliser un auto-apprentissage de cette carte. Par ailleurs, le contrôleur détecte le mouvement propre du véhicule. En combinant les données, il peut positionner le véhicule sur une surface théorique d'un kilomètre carré avec une précision de l’ordre du millimètre. Trois points identifiés suffisent pour cela. Même si 50% du sol est recouvert de sciure de bois, l'ELM ne se laisse pas impressionner et assure une navigation robuste et précise. De nouvelles rayures du sol sont ajoutées à la carte, tandis que les éléments qui ont disparu sont supprimés après un certain temps.
En option, les AMR peuvent être équipés de capteurs LIDAR supplémentaires sur une ou deux faces. Ces capteurs balayent l'espace dans le sens de la marche et détectent les obstacles, y compris ceux qui sont mobiles comme des personnes qui croiseraient la trajectoire. Le véhicule s'arrête alors immédiatement pour assurer la sécurité des employés.
Mobilité sans limites avec des roues Mecanum
Une roue normale ne se déplace que dans le même sens que son axe. Si vous voulez positionner précisément un véhicule doté de telles roues, vous devez manœuvrer comme pour garer une voiture. Pour éviter cela, les développeurs d'Evocortex ont opté pour la roue Mecanum. Au lieu d'une surface de roulement fermée, des rouleaux en forme de tonneau sont montés sur sa jante. Ils sont fixés inclinés de 45 degrés par rapport à l'axe de la roue et tournent autour de leur propre axe de roulement oblique. La forme, la taille et l'espacement des rouleaux sont tels qu'ils donnent à la roue une surface de roulement continue.
Lorsque la roue Mecanum tourne, deux composantes de force sont créées, l’une dans le sens de rotation de la roue entière et l’autre à la perpendiculaire de celle-ci. La direction du mouvement qui en résulte se trouve entre les deux : la roue Mecanum « veut » se déplacer à un angle de 45 degrés par rapport à la direction de l’axe. Cependant, de par la mobilité des rouleaux, il n’y a pas de rigidité directionnelle. Lorsque d'autres forces sont appliquées en plus, le mouvement peut être dévié dans n'importe quelle direction.
Sur un véhicule avec quatre roues Mecanum, les angles de 45 degrés sont chacun décalés de 90 degrés. Chaque roue s'oriente donc dans une direction différente. En faisant varier la direction et la vitesse de rotation de chaque roue, il est possible, à partir d'un départ arrêté, de diriger le véhicule dans n'importe quelle direction ou de le faire tourner sur place. Sur le plan horizontal, il peut se déplacer aussi librement qu'un aéroglisseur. Les roues Mecanum permettent donc le déplacement agile et omnidirectionnel du robot.
Évolutivité millimètre par millimètre
Les AMR d'Evocortex offrent encore une autre dimension de flexibilité : ils peuvent être fabriqués dans un nombre pratiquement illimité de tailles. « Si besoin, nous pouvons adapter notre robot aux souhaits de nos clients au millimètre près, souligne Hubert Bauer. Entre 400 par 480 et 800 par 1200 millimètres, toutes les dimensions extérieures sont possibles. » Dans le cas des gammes de produits EvoRobot R&D et EvoRobot Industrial, ces dimensions correspondent aussi approximativement aux dimensions extérieures de la plate-forme porteuse. L'ensemble de la technologie - capteurs, contrôleur, unité de levage et entraînement des roues - est monté sous la plate-forme.
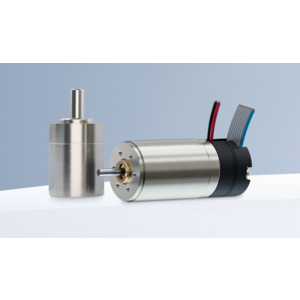
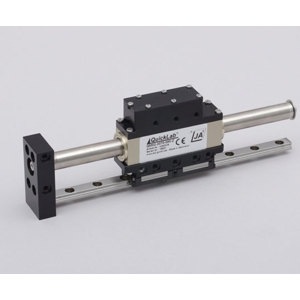
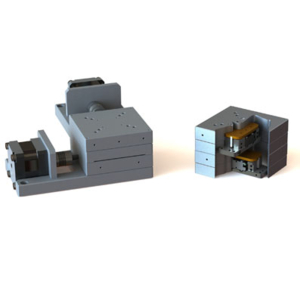
Le module d'entraînement des roues est un élément décisif pour cette évolutivité. Localisé directement au-dessus de chaque roue, il forme avec elle une unité fonctionnelle normalisée et indépendante. Les roues peuvent donc être montées à n'importe quelle distance les unes des autres. L'exigence décisive pour cet arrangement est un moteur puissant aux dimensions très réduites.
« Nous avons très attentivement examiné les moteurs disponibles sur le marché qui pouvaient être envisagés pour cela, se souvient Huber Bauer à propos de la phase de développement. Il n’y a que chez FAULHABER que nous avons trouvé la densité de puissance dont nous avons besoin. Les moteurs de la concurrence auraient nécessité plus d'espace pour le couple requis. »
Une puissance énorme dans un volume minimal
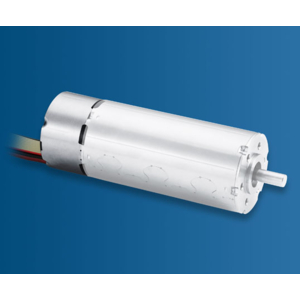
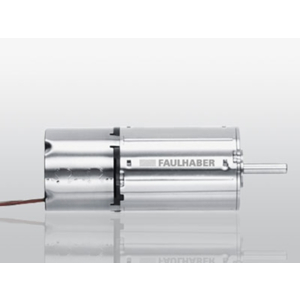
Les modules de roues de l'EvoRobot sont équipés de moteurs CC des séries 3257...CR ou 3272...CR. Ils ont chacun un codeur IEF3 et un réducteur 38/2 S. Les moteurs des roues sont également équipés d'un frein pour un arrêt rapide et pour assurer que les roues restent bloquées en position une fois arrêtées. « Grâce à l'énorme puissance de ces petits moteurs, l'EvoRobot est capable de transporter des charges allant jusqu’à 200 kilogrammes, et bientôt plus encore, explique Huber Bauer. Le transport fonctionne même sur une rampe inclinée de cinq degrés et à une vitesse d'un mètre par seconde. »
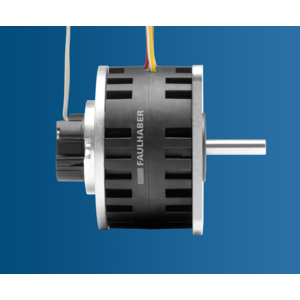
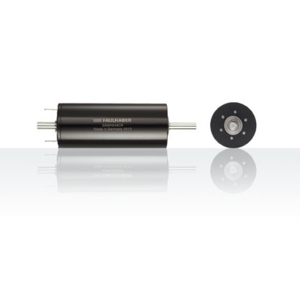
La gamme de produits EvoCarrier est conçue pour le transport de bacs pour petites pièces. À l'intérieur de cet AMR, l’espace est encore plus restreint que dans l’EvoRobot. Le robot est haut de moins de 100 mm. Il peut donc se déplacer dans des ouvertures extrêment basses sous une marchandise transportée. Deux ou quatre EvoCarrier peuvent par ailleurs fonctionner ensemble pour transporter des palettes ou une unité de rayonnage entière. Pour l’entraînement, les développeurs ont choisi un moteur dit « à rotor plat », un moteur sans balais de la série 4221... BXT d'une longueur de 21 millimètres seulement. L'EvoCarrier peut ainsi transporter des piles de bacs pour petites pièces (KLT) à roulettes pesant jusqu'à 120 kilogrammes au total. À plus long terme, le Directeur général estime que l'EvoRobot passera probablement aussi aux moteurs sans balais et que la standardisation des modules se poursuivra.
Outre le rapport entre la puissance et le volume, l'absence de maintenance et la fiabilité en régime continu jouent un rôle particulièrement important dans l'exploitation des AMR. « Avec les moteurs FAULHABER, nos exigences en termes de durée de vie sont plus que satisfaites, ajoute Hubert Bauer. En outre, le fait que les entraînements fonctionnent avec toutes les commandes industrielles courantes constitue également un avantage. Les experts de FAULHABER nous ont aussi beaucoup aidés à trouver le réglage optimal des paramètres pour la production en série. »