Pilz étend sa gamme avec des modules pour la robotique dans l’environnement industriel
24/08/2018
Pilz lance ainsi un nouveau système modulaire pour les applications de robots dans les environnements industriels qui comprend dans un premier temps, les modules de Pilz pour la robotique comprennent le manipulateur, le système de commande et l’interface de communication
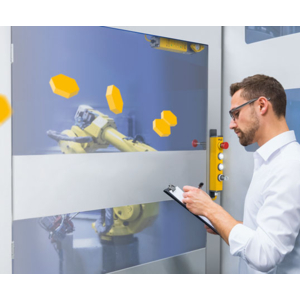
Ensemble, le manipulateur, le système de commande et l’interface de communication forment un package certifié par la DGUV (Deutsche Gesetzliche Unfallversicherung – assurance-accident légale allemande) conformément à l’EN ISO 10218-1 « Robots et dispositifs robotiques – exigences de sécurité pour les robots industriels » et réunissent ainsi toutes les conditions pour la mise en œuvre d’applications en sécurité avec des robots. Cela facilite la voie vers le marquage CE obligatoire. Les domaines d’application comprennent par exemple dans l’industrie les applications Pick & Place ainsi que les « petites cellules robotisées » modulaires, partiellement automatisées.
Système modulaire pour la robotique
Le manipulateur PSIR est un bras robotisé développé par Pilz, avec une capacité de charge de 6 kg. Grâce à ses 6 axes, son poids de 20 kg et une alimentation en courant 24 VDC, il est parfaitement adapté aux applications mobiles, par exemple en association avec un véhicule à guidage automatique (VGA).
Mouvement en toute sécurité
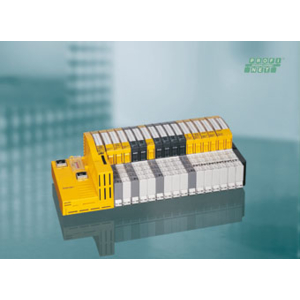
Dans le module de commande PRCM, le Motion Control et les systèmes de contrôle-commande de Pilz prennent en charge la commande des mouvements et celle de sécurité du robot. Les utilisateurs peuvent relier les modules et les utiliser immédiatement, selon le principe Plug and Play. Le système de commande prend en charge des protocoles de communication industriels ouverts, tels que CANopen, Ethercat ou Profibus. Vous pouvez programmer le RCM de Pilz aussi bien avec les langages API selon la CEI 61131-3 qu’avec le framework en Open Source ROS (Robot Operating System). Il vous offre ainsi une grande ouverture pour des extensions fonctionnelles.
Pilz a développé des modules logiciels pour la commande des robots sur la base du framework ROS, connu jusqu’à présent de l’environnement de recherche. Le logiciel offre des fonctions pour le traitement des capteurs, l’analyse, la conception et la commande de robots. L’objectif est d’utiliser également ROS dans des applications industrielles.
Un œil sur tout
Le module de fonctionnement PRTM permet la commande du robot via une interface utilisateur graphique, grâce à un logiciel de commande et de visualisation développé par Pilz. L’écran offre les fonctions de sélection du mode de fonctionnement, d’arrêt d’urgence et de diagnostic. Il permet une configuration et une programmation simples du bras du robot via un écran tactile sensible.
Autres actualités Pilz





Capteur radar de sécurité PSEN




Un exercice 2022 réussi pour Pilz














PILZ résiste à une cyberattaque massive









Un changement de génération au sein de Pilz





Scrutateur laser de sécurité PSENscan










Système de commande configurable PNOZmulti 2


Capteurs de sécurité codés PSENcode de Pilz







Capteur de sécurité codé PSENcode