CV-X480D : la solution complète et standard de dévracage 3D de Keyence
29/05/2020
Cette nouvelle solution de robotique guidée par vision 3D automatise les flux de production en permettant de déplacer des pièces à l’aide d’un robot guidé par de la vision 3D d’un bac jusqu’à un système de convoyage par exemple.
KEYENCE se distingue avec une solution plus économique, plus flexible, plus simple de mise en œuvre et particulièrement stable.
Cette solution de dévracage 3D permet de déplacer des objets plus lourds, il contribue à réduire la pénibilité du travail et les risques sur la santé des opérateurs. Outre la réduction des coûts d’exploitation en raison de la robotisation, ce système automatisé permet d’améliorer la régularité de la production et de réduire des erreurs, quel que soit l’environnement d’exploitation.
Avec KEYENCE, le prélèvement en masse automatisé d’un large éventail de cibles, y compris les cibles larges, lourdes et facilement endommageables devient très simple de mise en œuvre. De plus, la Série CV-X480D est très flexible dans le sens qu’il est très rapide de changer d’une pièce à l’autre. Pour ces raisons, cette solution est plus économique que la concurrence.
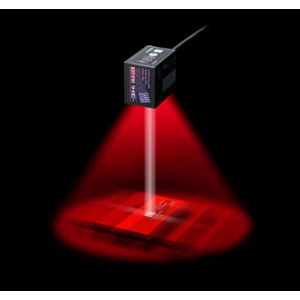
La Série CV-X480D a une conception intégrée : elle est composée d’un projecteur entouré de quatre caméras, pour réduire les angles morts. Ce système est équipé d’une nouvelle fonction de balayage 3D et d’une fonction de calcul de la solution optimale de manipulation des pièces, le tout à partir de 136 images capturées en 500ms et une répétabilité de 0.1mm. Il est compatible avec les robots ABB, DENSO, FANUC, YAKSAWA, KUKA, MITSUBISHI, STAUBLI et UNIVERSAL ROBOTS.
Le paramétrage et la configuration la plus simple du marché
15 minutes suffisent pour réaliser une première version du programme. La première étape consiste à créer l’image du bac et d’optimiser les paramètres de l’image avec une interface simple. L’étalonnage automatique 3D se réalise alors en un clic. La deuxième étape est la reconnaissance de pièce qui se réalise par le simple chargement des données CAO. Une solution alternative consiste à apprendre la pièce de manière empirique avec la fonction 3D Search.
La dernière étape est de paramétrer le fonctionnement de la pince du robot par le biais d’une interface graphique. Une fois cette opération enregistrée, le système KEYENCE identifie de manière instantanée des problèmes nécessitant un ajustement (amener le robot en position, définir les points de prise, définir les points de dépose, collision de bord…). Le logiciel permet de simuler physiquement la prise et offre des solutions pour les pièces non atteignables : pousser ou faire basculer la pièce par exemple.
La supériorité technologique de KEYENCE pour une identification des pièces stable
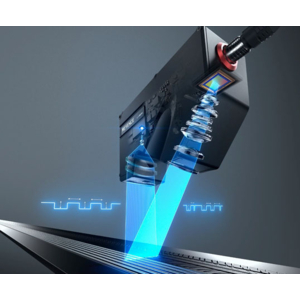
La Série CV-X480D intègre 4 caméras de la Série CV-X, connue pour sa performance, sa stabilité et son ergonomie. Elle met en œuvre une vision 3D selon la technique à projection de franges : plusieurs motifs de rayures sont projetés à grande vitesse. La lumière réfléchie par les cibles est analysée en temps réel par un capteur CMOS ultra-haute vitesse et un processeur génère une image 3D. En complément, le système dispose d’un algorithme de projection de lumière double axe. Il projette et analyse les projections de motif à des angles de 90 degrés, ce qui réduit l’impact des réflexions sur les surfaces brillantes.
Le système est extrêmement fiable et stable. Le projecteur et le capteur CMOS haute précision nouvellement développés offrent de puissants niveaux d’éclairage et une large plage dynamique. Même les pièces avec des formes complexes et une réflexion diffuse faible peuvent être capturées avec une grande précision. Une analyse simultanée du profil ainsi que des surfaces de la pièce cible permet une capture d’images avec des détails infimes. Cette capacité à enregistrer les détails précis des objets cibles permet également d’effectuer des vérifications de différence avant/arrière et des actions de détermination de phase de rotation qui étaient auparavant très difficiles.
Ce système est particulièrement ouvert. L’interface prend en charge la liaison avec des automates programmables créés par d’autres fabricants, ainsi que la communication EtherNet/IP et PROFINET, permettant ainsi son intégration aisée dans un système existant. De fait, la commande à distance via un ordinateur ou le transfert des résultats et images vers un serveur FTP sont possibles. Les connexions avec les unités de mémoire US 3.0, RS-232C/Ethernet et PLC-Link sont aussi disponibles.
Autres actualités KEYENCE France











Marqueur laser UV 3D de KEYENCE











Scrutateurs laser de la série SZ







Projecteur de profil numérique


Micromètre de précision LS-9000






Microscopes numériques VHX-2000


Nouveau capteur laser série LR-Z



Dispositifs antistatiques Série SJ





Projecteur de profil IM‐6000



Microscope numérique VHX-1000