Le système de préparation Robo-Pick de Schaefer, élu "Meilleur produit 2011"
18/04/2011
Lors du salon LogiMAT de cette année à Stuttgart, un jury indépendant d'experts a élu le Robo-Pick (SRP) Schaefer "Meilleur produit 2011". Ce système de préparation de commandes a fini premier de la catégorie "Prélèvement, emballage, sécurisation" parmi une multitude de concurrents.
Pour la 8ème fois, des représentants du commerce, des sciences et des médias ont évalué d'un œil critique les produits exposés lors du LogiMAT 2011 en amont du salon. Ont été récompensés les systèmes contribuant considérablement à la rationalisation des processus, aux réductions de coûts ainsi qu'à l'augmentation de la productivité dans le secteur de l'intralogistique. Le Robo-Pick de SSI Schaefer a reçu le prix du "Meilleur produit 2011".
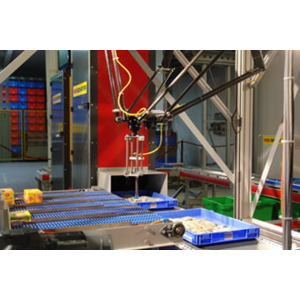
Le SRP est le système de préparation de commandes le plus rapide au monde. Il est capable de prélever des produits de tailles, de formes et de poids différents à une vitesse de 2 400 objets/heure, sans erreur et avec ménagement pour les produits. La première cellule de picking entièrement automatisée peut être intégrée sans heurts dans les systèmes de stockage déjà existants. Grâce à son système novateur de traitement de l'image en deux étapes (une combinaison de procédures de traitement d'images 2D et 3D), nul besoin de saisir les caractéristiques et la position des produits. Un grand degré de flexibilité est ainsi obtenu et fait du Robo-Pick de SSI Schaefer le produit idéal pour une large gamme d'applications. Moins d'une seconde seulement est nécessaire à la cellule de traitement de l'image pour détecter la position du produit sur le plateau et mettre en service le robot. Selon leur structure, 10 à 20 commandes peuvent être traitées simultanément. Par rapport au picking manuel, ce système réduit les erreurs de 10 à 100 fois.
Procédure : lors d'un processus de picking type, un convoyeur approvisionne le Robo-Pick avec des bacs de produits préalablement triés. La position exacte, la hauteur et le centre de gravité de l’article sont ensuite détectés au moyen de caméras 2D et 3D par un processus de traitement de l'image en deux étapes. Un logiciel de traitement d'image mis au point tout spécialement reconnaît les formes et les bords des articles en une fraction de seconde. Une fois la reconnaissance de l'image effectuée, le robot est mis en marche. En quelques secondes, le robot place les produits demandés dans les bacs en fonction du signal envoyé par le système de gestion de l'entrepôt. Des produits de tailles, de formes et de textures différentes sont ensuite prélevés avec ménagement par un préhenseur par aspiration.
Autres actualités SSI Schaefer









Un nouveau site web pour SSI SCHÄFER