KUKA facilite la robotisation avec son nouveau contrôleur et OS tout en un
14/07/2025
Le nouveau système d’exploitation iiQKA.OS2 avec son interface utilisateur moderne, rend la robotisation accessible et facile à prendre en main, quel que soit le profil de l’utilisateur.
Un contrôleur de robot unique répondant aux exigences industrielles de demain
Equipé d’une carte d’extension NVIDIA, le contrôleur est prêt à intégrer l’IA, nécessaire pour des applications spécifiques comme la vision.
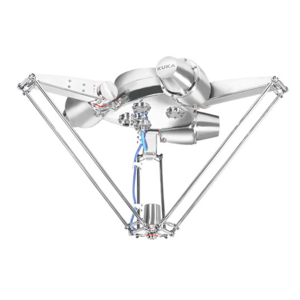
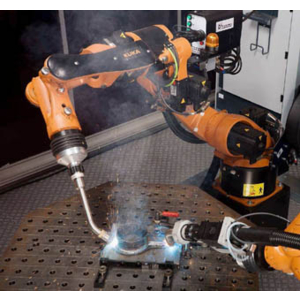
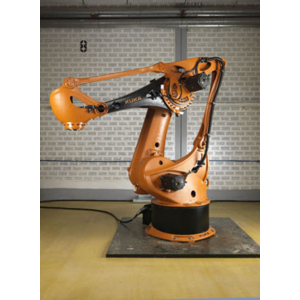
Avec le nouveau système d'exploitation, toutes les cinématiques des robots KUKA pourront être commandées avec le même contrôleur : des delta et scara jusqu’au robots 6 axes de toutes les capacités de charge. Pour répondre aux besoins des industries, la fonction « use your own device » (utilisez votre propre matériel) apporte une grande flexibilité dans l’utilisation du boîtier d’apprentissage. Il est désormais possible d’utiliser le smartPAD ou bien une tablette classique.
Une interface tout-en-un pour la simulation, la programmation et la mise en service
Grâce aux jumeaux numériques, le travail avec les robots est plus simple et plus rapide que jamais. La programmation off-line et la mise en service virtuelle fournissent des solutions d'automatisation innovantes en phase avec les principes de l'industrie 4.0.
En combinaison avec le nouveau système d'exploitation KUKA, iiQWorks permet de créer un jumeau numérique complet d'un système robotique KUKA. Ainsi, il est possible de réaliser des études de faisabilité, d'agrandir des installations existantes et de planifier de nouvelles installations avec une grande précision.
iiQWorks élimine les barrières entre les différentes étapes de production et rend le déploiement des robots plus facile. Ainsi il est possible de programmer directement les robots KUKA en mode hors ligne, c'est-à-dire sans accès à un robot réel, depuis le logiciel. Les programmes des robots et la disposition des cellules peuvent être vérifiés à l'avance pour confirmer l'adéquation pratique, les temps de cycle et la stabilité du processus. Cela simplifie et optimise considérablement le processus de planification, de conception et d'optimisation de la cellule robotique.