Trophées Industrie 2008, ABB - division Robotique lauréat avec une fonction brevetée d'auto-apprentissage de trajectoire
29/02/2008
ABB présente une nouvelle fonction brevetée d'auto-apprentissage de trajectoire par le robot pour les opérations d'ébavurage ou de polissage (parachèvement).
Cette fonction combine le pilotage en effort du robot associé à une interface utilisateur simplifiée.
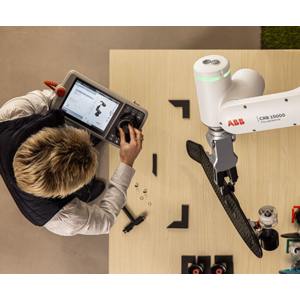
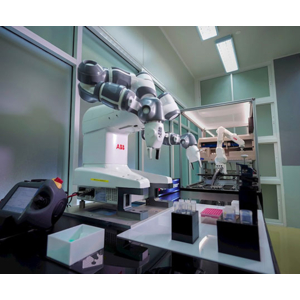
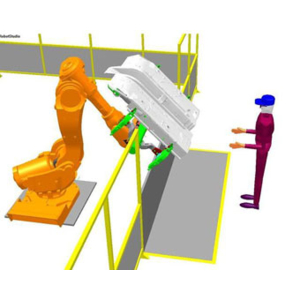
L'opérateur ne réalise plus qu'un apprentissage des points caractéristiques d'une trajectoire en déplaçant le robot "à la main" et non plus avec le pupitre de programmation.
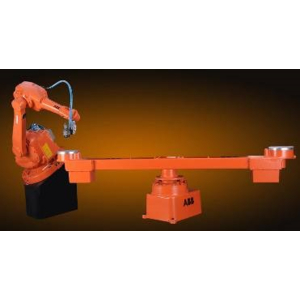
L'apprentissage final de la trajectoire est réalisé sur une pièce de référence avec l'outil final, en appliquant un effort constant sur la pièce pour mémoriser tous les points nécessaires à la trajectoire finale. L’opérateur est en sécurité pendant la phase d’apprentissage, car le robot reste toujours en mode manuel sous contrôle de l'opérateur. Cette fonction est compatible avec les différents types de robot ABB pouvant être utilisés - robots de 5kg à 650kg - l’effort pour déplacer le robot en mode d’apprentissage reste le même pour l’opérateur (<500g).