Positionneur de pièces IRB 5320 pour robot de peinture
06/05/2013
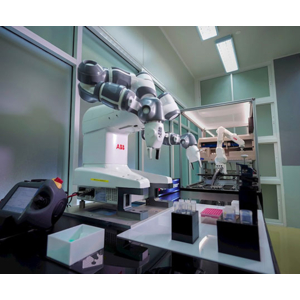
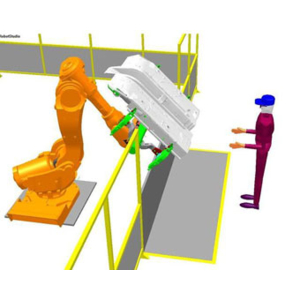
Ce positionneur de pièces est un manipulateur intégré à un robot de peinture à 6 axes qui permet de simplifier le processus de peinture.
Le positionneur IRB 5320 est disponible en un ou trois axes.
=> Une productivité accrue avec une version trois axes
La version à trois axes de l'IRB 5320 est utilisée pour positionner avec précision les pièces à peindre. Les petites tables pivotantes en bout de bras sont commandées par l'armoire de commande du robot. Elles servent alternativement de station de charge/décharge et d'emplacement de mise en peinture des pièces. Une fois la mise en peinture terminée, le bras pivote pour amener les pièces peintes avec précision et efficacité vers la station de décharge. Il est équipé d'une butée fixe limitant sa rotation. Les câbles électriques et les flexibles de purge sont intégrés dans sa mécanique pour une protection optimale.
=> Une solution simple en version 1 axe
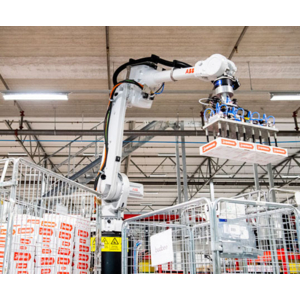
La version 1 axe du positionneur IRB 5320 se compose d'une table pivotante commandée par l'armoire de commande du robot et conçue pour indexer les pièces à peindre. Ce positionneur 1 axe, fabriqué avec précision et fiabilité, repose sur un réducteur ABB robotique éprouvé, et déjà livré en plusieurs milliers d'unités. Le positionneur 1 axe constitue une solution flexible garantissant la précision et le contrôle de position des pièces de taille moyenne.
Adapté aux zones dangereuses
Les positionneurs 1 et 3 axes sont conçus pour être installés dans des zones dangereuses et ont reçu la certification EX. Le système de purge parallèle à celle du robot offre une totale latitude quant à l'implantation du positionneur par rapport au robot. Le système de purge assure le renouvellement de l’air comprimé jusqu’aux zones intégrant des composants électriques.
Une configuration totale pour la peinture
L'IRB 5320 garantit une programmation, une installation, une mise en service, une utilisation, un entretien et une maintenance des plus aisés – grâce notamment au système de commande et à l'interface homme-machine (IHM) communs au robot et au positionneur. Cette solution standardisée est particulièrement adaptée aux opérations de peinture dans les secteurs de l'informatique, des communications et de l'électronique grand public, remplaçant avantageusement les systèmes de convoyeurs ou solutions d'ingénierie classiques.