Moteurs avec codeur absolu et interface Ethercat
23/11/2009
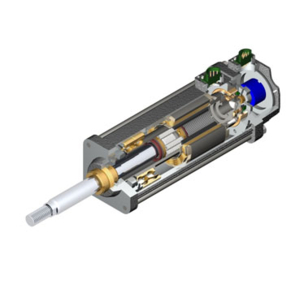
Les servomoteurs de la série SH-DIS avec électronique intégrée sont à présent disponibles en plus du CANOpen et du ProfibusDP, avec l’option ETHERCAT.
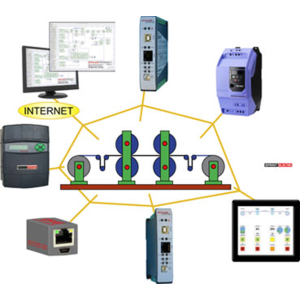
Ce module de communication ethernet en temps réel ouvre de nouvelles possibilités de communications par bus rapides jusqu’à 100Mb/s.
La connectique du bus est réalisée par 2 connecteurs (Bus-In / Bus-Out) qui évitent des liaisons onéreuses par T. Les variateurs peuvent être en plus commandés par la liaison RS232 interne. Ils sont alimentés par une tension de 24 à 48VDC et pilotent des moteurs brushless avec codeur absolu Hiperface mono ou multi tours. Ils délivrent un couple nominal de 1 à 3Nm.
Hormis la communication par bus, il est possible de mémoriser jusqu’à 64 trajectoires et de les sélectionner par codages BCD. Une consigne analogique permet de les piloter en vitesse, couple ou position avec une sortie émulation codeur.
Autres actualités Transtechnik SA

Actionneur à vis à rouleaux FT 45

Variateur asservi DC série XLV







Unités linéaires tout Inox

Unités Linéaires tout Inox
Moteurs couple de la série MK-CI



Pupitres tactiles économiques